Hypersonic air vehicle reentry trajectory optimization method based on reentry point parameter
A hypersonic, re-entry trajectory technology, used in instruments, vehicle position/route/altitude control, non-electric variable control, etc. It can solve the problem of long optimization time, inability to guarantee global optimality, separate design of longitudinal trajectory and lateral trajectory, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
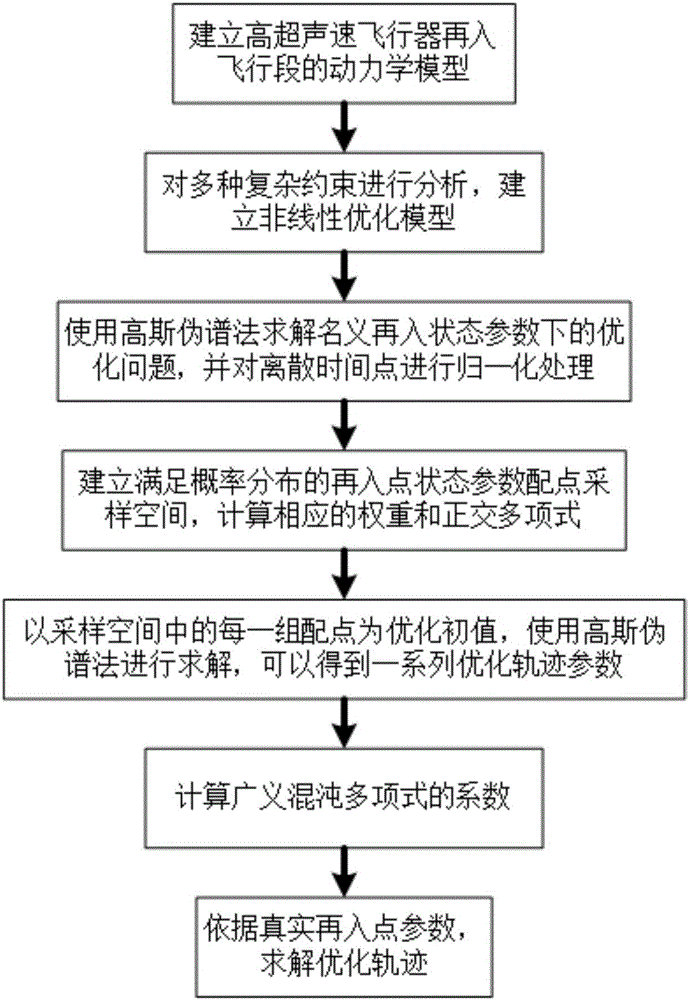
Problems solved by technology
Method used
Image

Examples
example 1
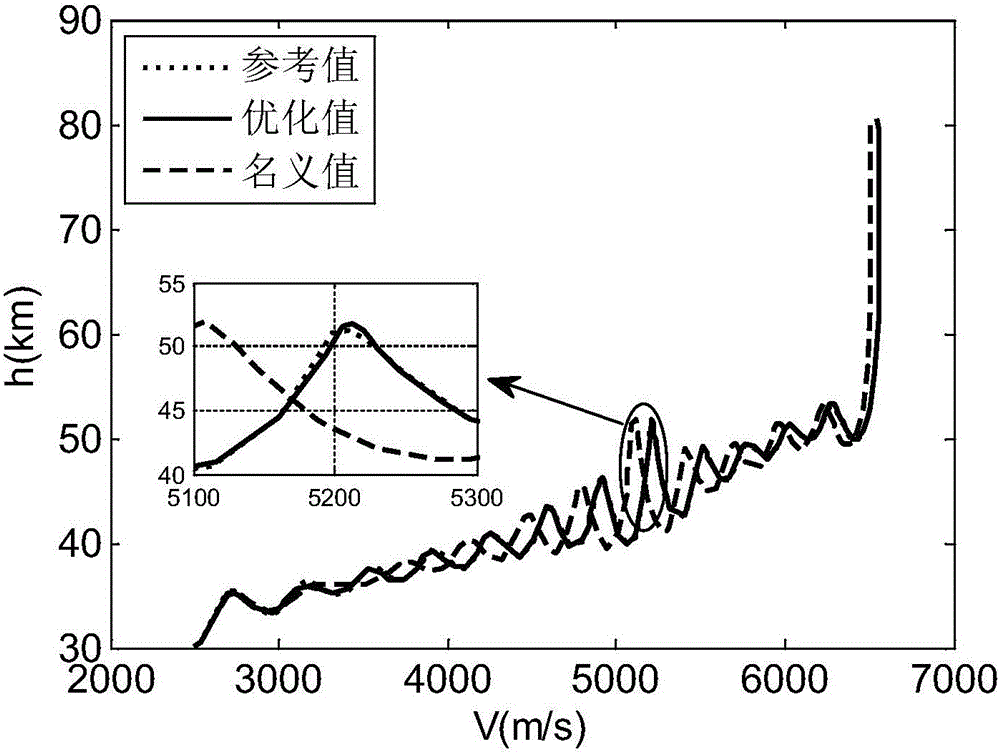
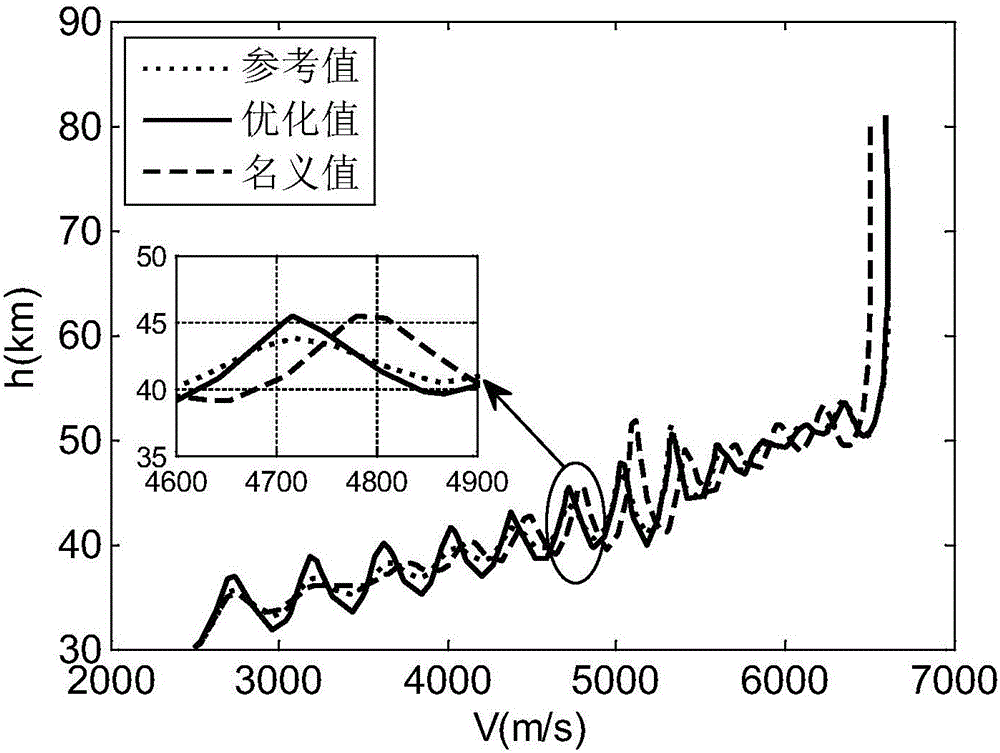
[0073] Example 1 Calculate the output variable of the optimized trajectory according to the state parameters of the re-entry point for use by the guidance system, that is, the output variable Y=[r, λ, φ, V, θ, σ, t in step S700 f ,J m ].
[0074] This example studies the trajectory optimization results of three uncertainty levels, |k i |=1,2,3. In the example, "reference value" represents the optimization result using the Gaussian pseudospectral method with the actual re-entry point state parameter as the initial value, and "optimized value" represents the use of the present invention based on the re-entry point parameter uncertainty expansion method to obtain the actual re-entry point The state parameter is the optimized trajectory obtained from the initial value, and the "nominal value" means the optimization result calculated offline using the Gaussian pseudospectral method with the initial value of the state parameter at the nominal re-entry point.
[0075] Figure 2~4...
example 2
[0080] Example 2 Calculate the control variables of the optimized trajectory according to the state parameters of the re-entry point for use by the control system, that is, the output variable Y=[θ, σ, t in step S700 f ,Jm ].
[0081] Study the worst case of optimization results in Example 2 (uncertainty level|k i |=3), use the method provided by the present invention to calculate the optimal control variable, then add the optimal control variable to the dynamic equation, integrate to obtain the motion state, and compare the state parameter and the control parameter.
[0082] The result is as Figure 5-6 As shown, the height versus time curves and the variation laws of the horizontal motion trajectory of different optimization methods were compared. It can be seen that the optimization method based on the re-entry point parameters used in the present invention has a better effect of optimizing the result close to the reference value, but the nominal integral trajectory is se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com