Drop-and-pull transport dynamic path planning method based on receding horizon optimization
A technology of dynamic path and rolling time domain, applied in instruments, data processing applications, forecasting, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
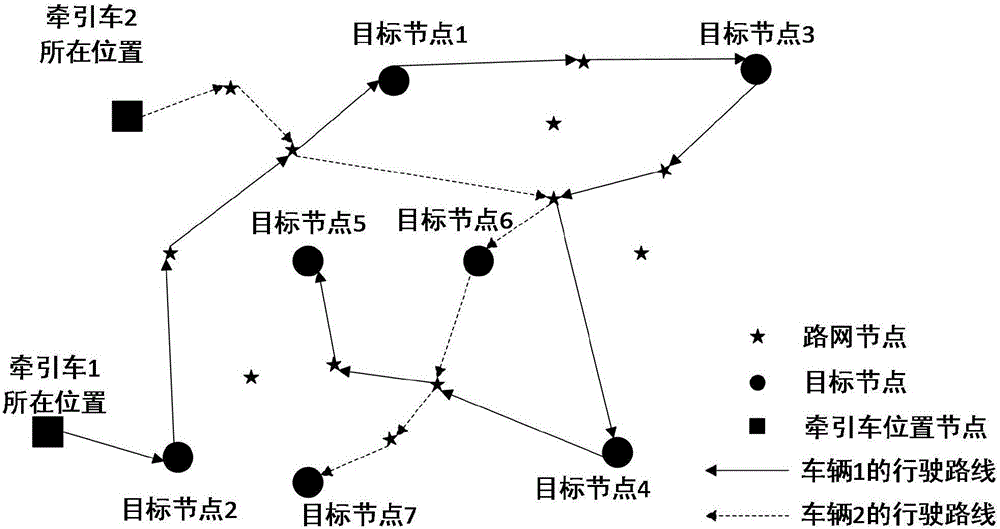
[0062] In this embodiment, a dynamic route planning method for drop-and-pull transport based on rolling time-domain optimization is applied to a depot A and R target nodes U 1 , V road network nodes U 2 And in the distribution service area formed by the node S where P tractors are located, set a vertex of the circumscribed square of the distribution service area as the coordinate origin o, and set the two adjacent sides in the horizontal and vertical directions connected to the coordinate origin o Set as the x-axis and y-axis respectively, thus forming the Cartesian coordinate system xoy; in the coordinate system xoy:
[0063] Define the location of parking lot A as (x 0 ,y 0 ), define the position of P tractors from yard A (x 0 ,y 0 ) starting; record P tractors as K={K (1) ,K (2) ,...,K (p) ,...,K (P)}, 1≤p≤P,K (p) Indicates the p-th tractor; P tractors are in one-to-one correspondence with the location nodes of P tractors;
[0064] Denote the R target nodes as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com