Indoor robot navigation system and method
An indoor robot and navigation system technology, applied in the field of indoor robot navigation system, can solve the problems of low practicability and no consideration of dynamic obstacles, and achieve the effect of high practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
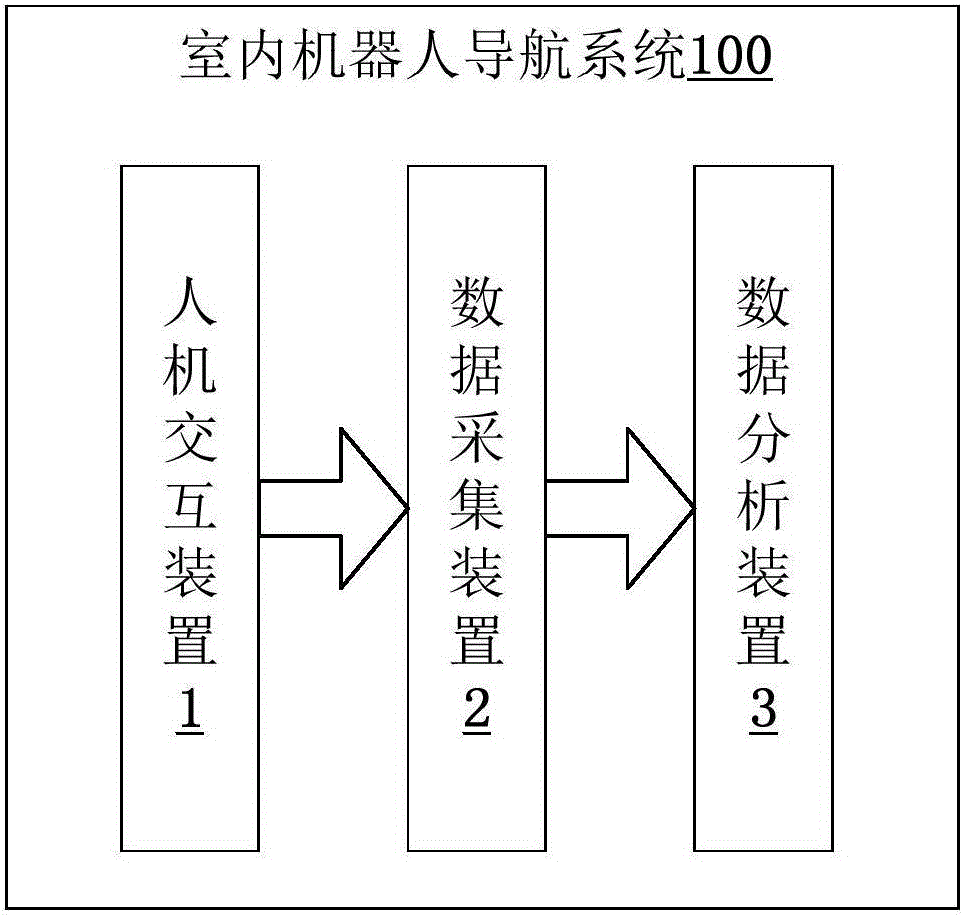
[0022] combine figure 1 , this embodiment provides an indoor robot navigation system 100, applied to a robot, including;
[0023] Human-computer interaction device 1: used to receive the coordinates of the end position of the robot and the attitude information of the end position of the robot input by the user;
[0024] Data acquisition device 2: used to obtain the current position coordinates of the robot and the current position and posture information of the robot;
[0025] The data analysis device 3 is configured to use the first algorithm to generate a cost between the current point and the end point according to the end point position coordinates, the end point position and attitude information, the current position coordinates, the current position and attitude information, and the pre-acquired two-dimensional global static map Minimum global reference path;
[0026] The data acquisition device 2 is also used to update the local area map within a fixed radius from the...
Embodiment 2
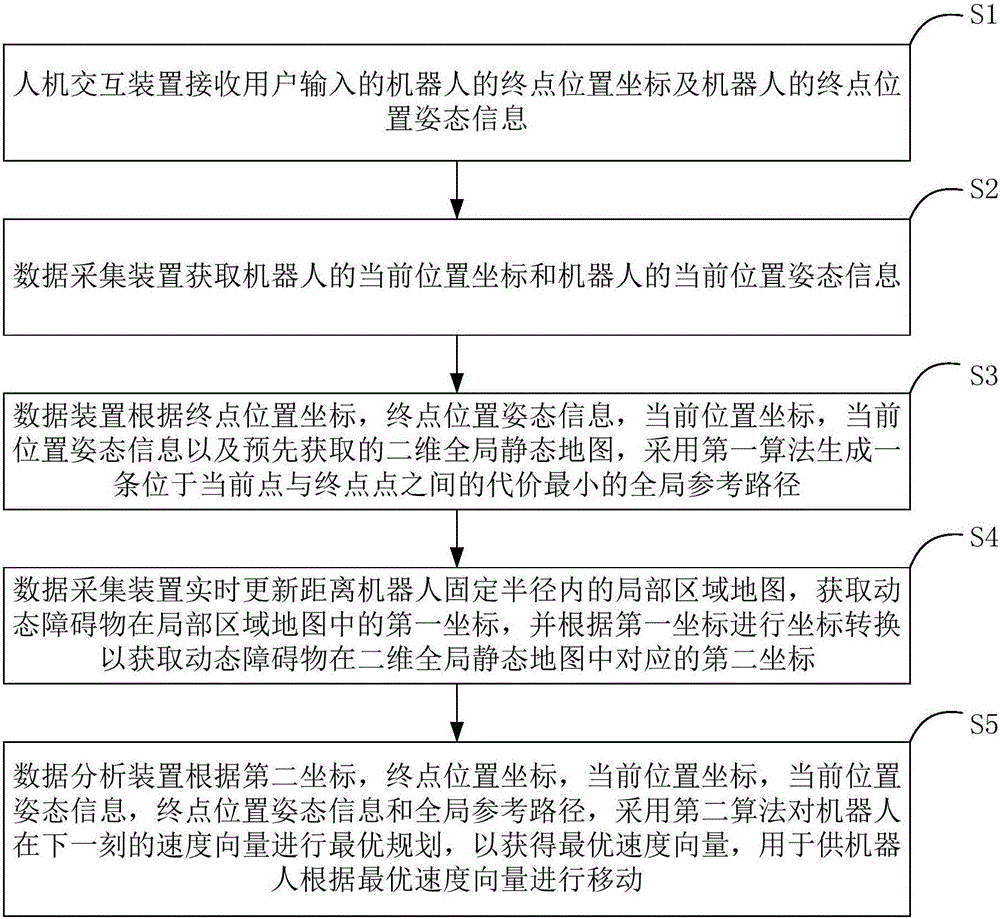
[0055] combine figure 2 , this embodiment provides an indoor robot navigation method applied to a robot, including;
[0056] Step S1: The human-computer interaction device 1 receives the end position coordinates of the robot and the attitude information of the end position of the robot input by the user;
[0057] Step S2: the data acquisition device 2 acquires the current position coordinates of the robot and the current position and posture information of the robot;
[0058] Step S3: The data analysis device 3 uses the first algorithm to generate a cost between the current point and the end point according to the end point position coordinates, the end point position and attitude information, the current position coordinates, the current position and attitude information, and the pre-acquired two-dimensional global static map Minimum global reference path;
[0059] Step S4: The data acquisition device 2 updates the local area map within a fixed radius from the robot in rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com