Human body skeleton-based action recognition method
A human skeleton, action recognition technology, applied in the field of pattern recognition and human-computer interaction, can solve the problem of inability to measure the similarity of actions and actions, matching information (unreasonable eigenvalues, increasing complexity and difficulty, etc.)
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The specific implementation manners of the present invention will be further described in detail below in conjunction with the drawings and examples.
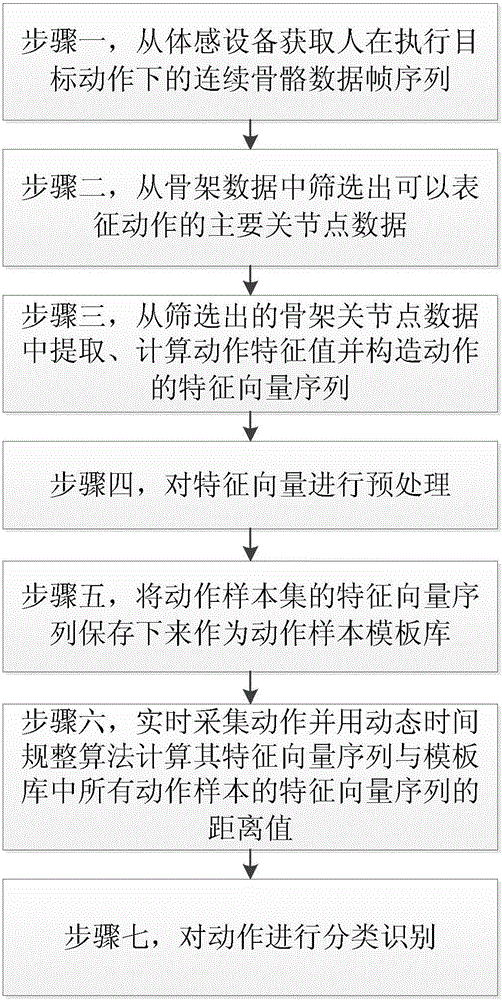
[0054] combine figure 1 , a kind of motion recognition method based on human skeleton that the present invention proposes, comprises following concrete steps:
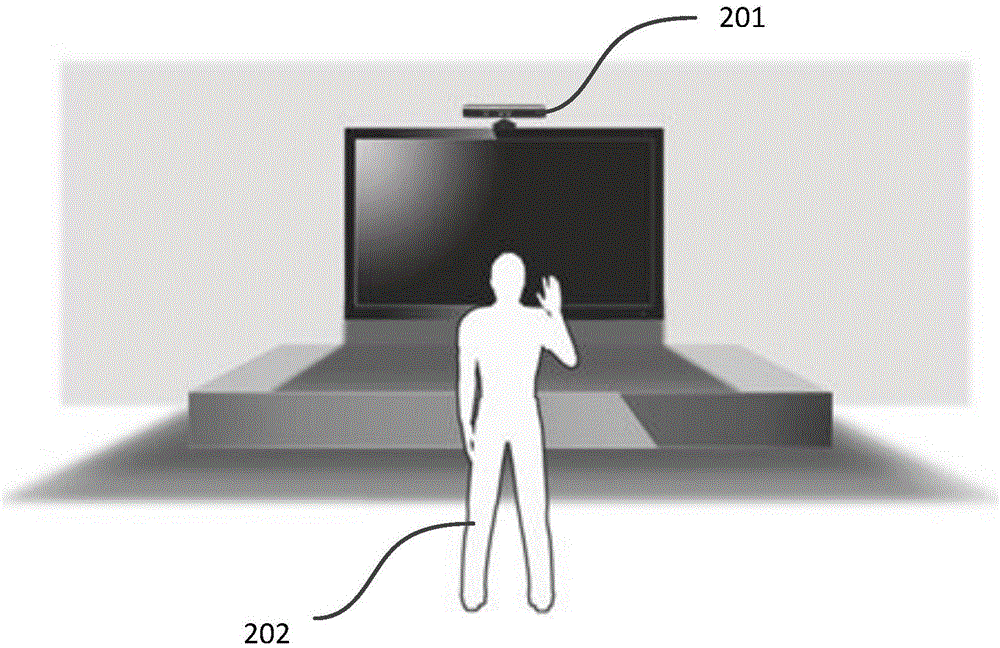
[0055] Step 1, acquiring the continuous skeleton data frame sequence of the person performing the target action from the somatosensory device: the somatosensory device refers to a collection device that can at least obtain 3D space position information and angle information of each joint point including the human skeleton; The human skeleton data includes the data of human joint points provided by the acquisition device;
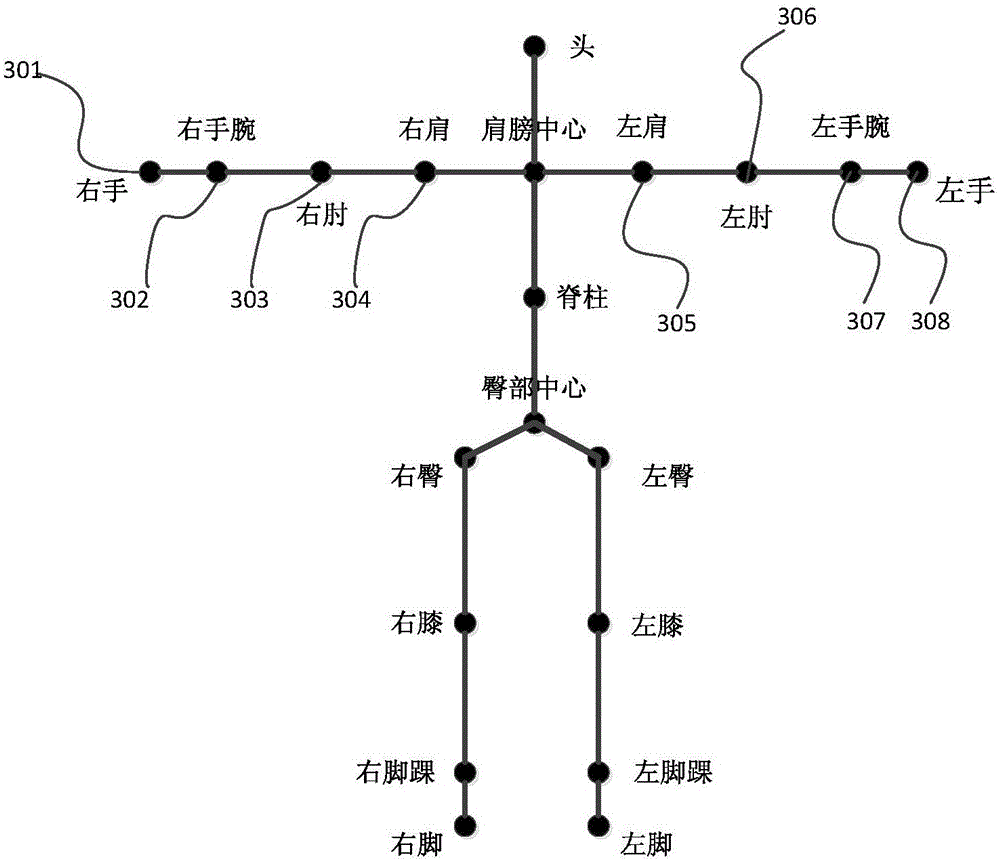
[0056] Step 2, selecting the main joint point data that can represent the action from the skeleton data: the main joint point data that characterizes the action is the joint point data that plays a key role in action recognition;
[0057] Ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com