Calibration method of inertial unit optical aiming prism installation error
A technology for optical aiming and installation errors, applied in the direction of measuring devices, instruments, theodolite, etc., can solve the problems of incomplete parameter calibration, high requirements for testing equipment, limited application range, etc., to avoid expensive and deduct poor vertical plate indicators , the effect of reducing requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
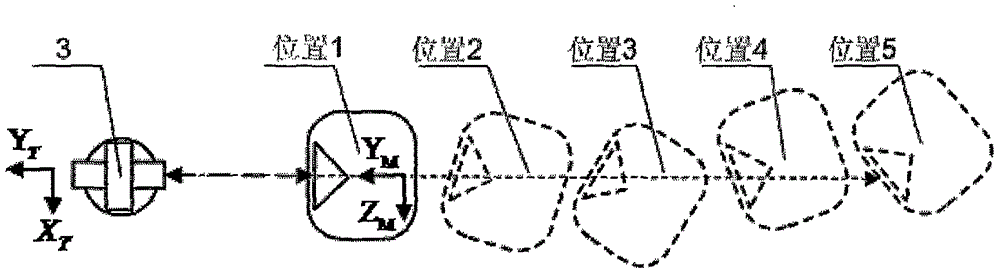
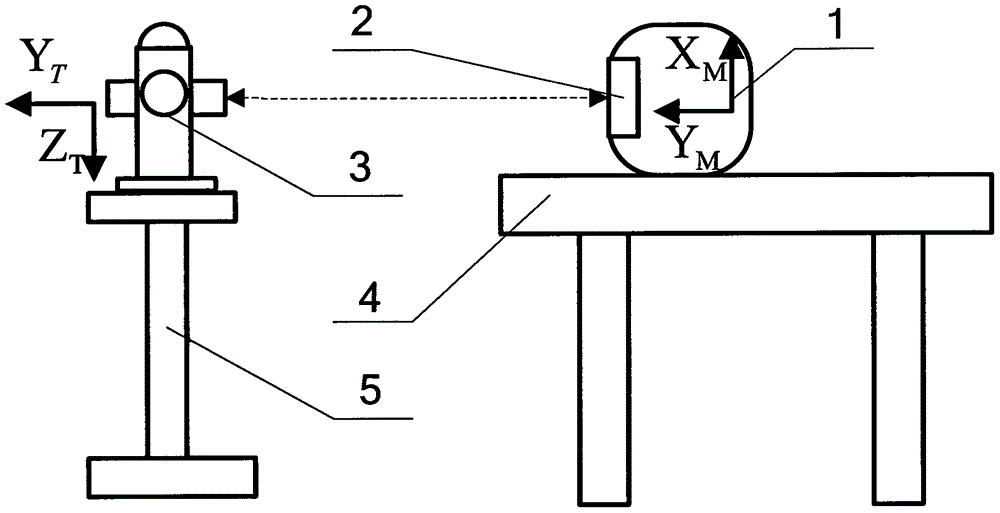
[0053] Step 1: If figure 1 As shown, the inertial group 1 is placed on the platform 4 , the ridge line of the inertial group optical aiming prism 2 is vertical when placed, and the light-transmitting surface faces the autocollimating theodolite 3 . The autocollimating theodolite bracket 5 is erected directly in front of the inertial group optical aiming prism 2, and can be introduced into the position of the north azimuth reference, with a distance of 0.5m-5m. The self-collimating theodolite 3 is fixed on the self-collimating theodolite support 5, adjusts the self-collimating theodolite support 5 so that the line-of-sight axis of the self-collimating theodolite 3 is equal to the inertial group optical aiming prism 2, and the self-collimating theodolite 3 is accurately carried out Leveling. After the equipment is set up, the cable connected to the iner...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com