Knuckle movement module of five-finger dextrous hande based on worm wheel and worm mechanism
A technology of worm gear and motion module, which is applied in the specific application of worm gear mechanism in the dexterous hand of humanoid five fingers, in the field of knuckle motion module, to achieve the effect of compact mechanical structure, light volume and shape, and good controllability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
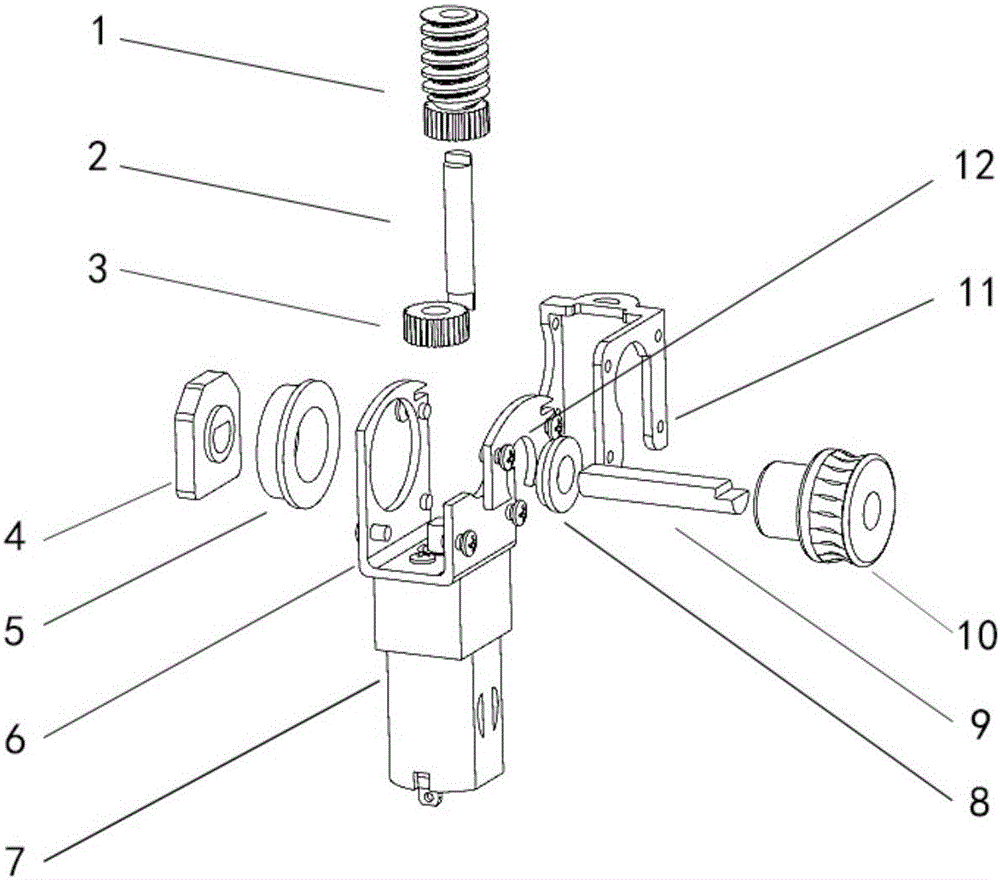
[0023] attached figure 2 It is an exploded diagram of the worm gear mechanism module; it mainly includes the worm and gear parts (1), the worm D-axis (2), the motor output gear (3), the potentiometer (4), the flange bearing (5), and the sheet metal case- 1 (6), motor (7), bearing (8), worm gear D-axis (9), worm gear (10), sheet metal casing-2 (11), sheet metal casing-3 (12).
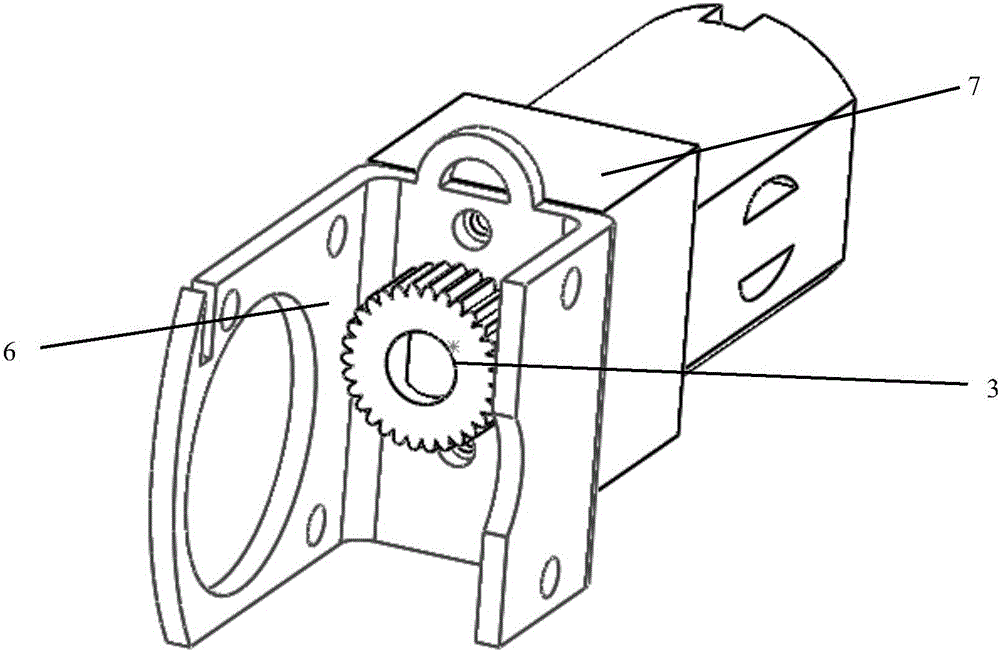
[0024] attached image 3 It is a schematic diagram of the connection between the motor and the sheet metal case. Fix the motor (7) on the sheet metal casing-1 (6), extend the motor (7) shaft into the U-shaped structure of the sheet metal casing-1 (6), and connect the motor output gear (3) at the output shaft.
[0025] attached Figure 4 Schematic diagram of the layout of the worm gear. The worm and the gear part (1) are respectively connected with the motor output shaft gear (3) and the worm wheel (10), the layout is compact, and the direction of the motor output torque is changed.
[0026] attache...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com