


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Autonomous and accurate positioning system of mobile robot based on RFID(Radio Frequency Identification) and method thereof
A mobile robot and precise positioning technology, applied in character and pattern recognition, instruments, computer components, etc., can solve the problems of high complexity of positioning system, ultrasonic attenuation, poor fault tolerance, etc., achieve clear running direction and enhance popularization , design reasonable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0035] Embodiment 1: Positioning scheme of a single card reader:
[0036] like figure 2 As shown, a card reader 2 is installed inside the mobile robot, and the radio frequency card 1 is laid on the ground according to the step length of 2cm, and the transmitting power of the radio frequency card 1 and the receiving power of the card reader are set, so that the card reader can effectively detect the radio frequency card. The reading distance is 2mm, and at most one radio frequency card can only receive the transmission signal at the same time; when locating, follow the steps below:
[0037]Lay radio frequency cards under the ground of the preset activity area of the mobile robot according to the step length L, set the coordinate origin, and mark the ground physical coordinates corresponding to all radio frequency cards to form the formatted data of the digital map of the robot’s preset activity area and store it in the database middle;
[0038] The radio frequency card rea...
Embodiment 2
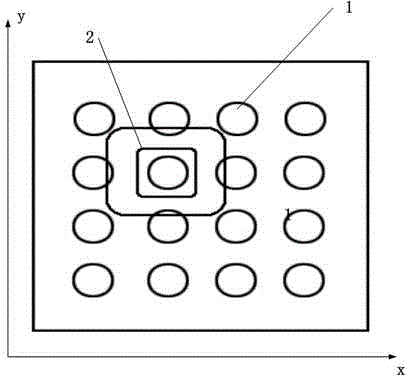
[0039] Embodiment 2: Positioning scheme of multiple card readers:
[0040] In this embodiment, 4 card readers are set inside the mobile robot, such as image 3 shown. Its positioning process is the same as that in the embodiment, the difference is:
[0041] Establish a central coordinate system with the center point of the four card readers as its origin, and the center coordinates of the card reader are (Rnx, Rny), for example, card reader 1, card reader 2, card reader 3, and card reader 4 The center coordinates are:
[0042] (R1x, R1y), (R2x, R2y), (R3x, R3y), (R4x, R4y).
[0043] When one of the readers reads a certain radio frequency card, according to the physical coordinates recorded inside the radio frequency card or the physical coordinates of the card laid by the card serial number retrieved is (Cx, Cy), and the physical coordinates of itself are calculated as (Cx- Rnx, Cy-Rny).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com