A Model Reconstruction Method of Single-joint Fault Manipulator Based on Projective Geometry
A technology of faulty machinery and projection geometry, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to perform motion control, and change the motion model of manipulators, so as to meet real-time requirements, improve efficiency, and have obvious versatility. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
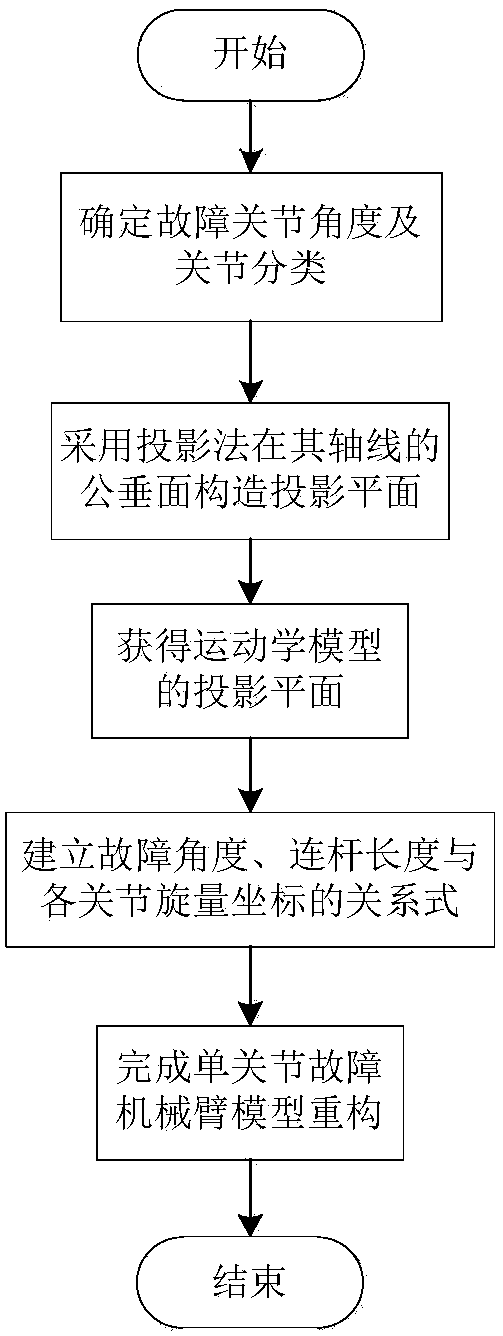
[0050] 1. The projection method is used to perform two-dimensional projection on the kinematics model of the single-joint failure manipulator
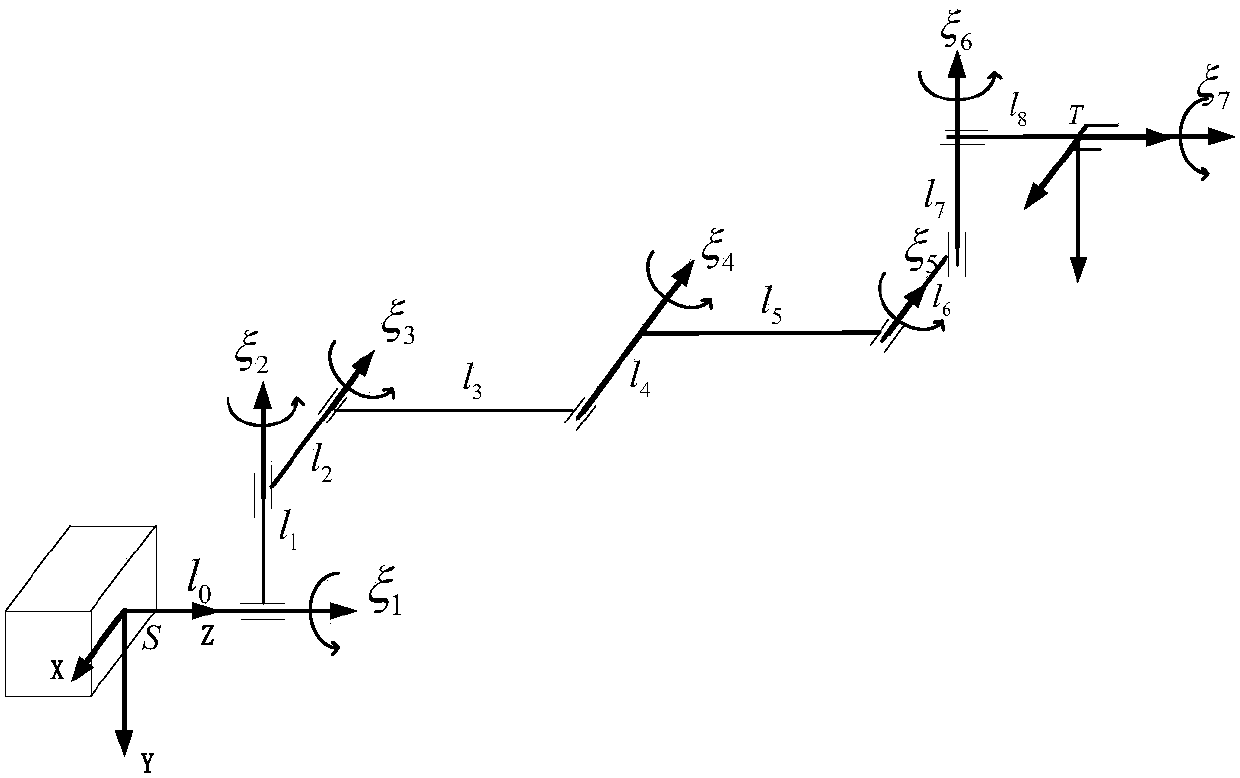
[0051] Such as figure 1 Shown is the flow chart of the method of the present invention. The present invention takes the mechanical arm with seven degrees of freedom in space as the research object, the length of each bar is shown in Table 1, and the configuration of the mechanical arm is as follows figure 2 shown. For each joint J i (i=1,...,7), construct its motion screw, and the coordinates of the screw are shown in Table 2.
[0052] Table 1 Length of connecting rod
[0053]
[0054] Table 2 Spinor coordinates under normal state
[0055]
[0056] X-axis joint J 3 When locked at 30°, J 3 The subsequent joints are labeled as The reconstructed spinor system is as image 3 As shown, the YZ direction projection diagram is as follows Figure 4 shown. Y-axis joint J 2 When locked at 30°, J 2 The subsequent joints are labe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com