Continuous jumping type step climbing robot and step adaptive climbing method
A robotic and leaping technology, which is used in the rescue of vehicles, patient chairs or special transport tools, manipulators, etc., to achieve the effect of synchronous rotation angle, smooth transportation, and stable climbing process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] In order to make the technical means, creative features, objectives and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
[0043] In the description of the present invention, the terms "left end, right end, front end, rear end, left side, right side, inward, outward" etc. are only for convenience of description and definition, and should not be construed as limiting the present invention.
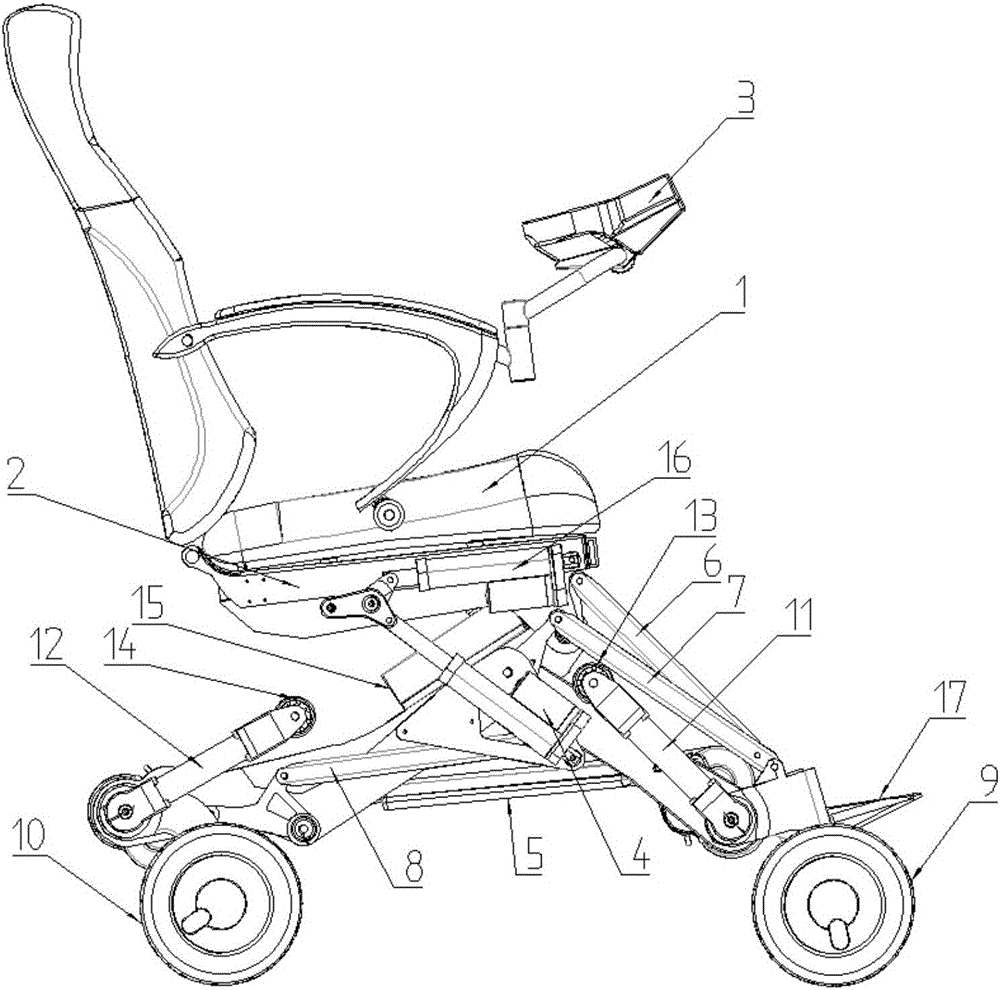
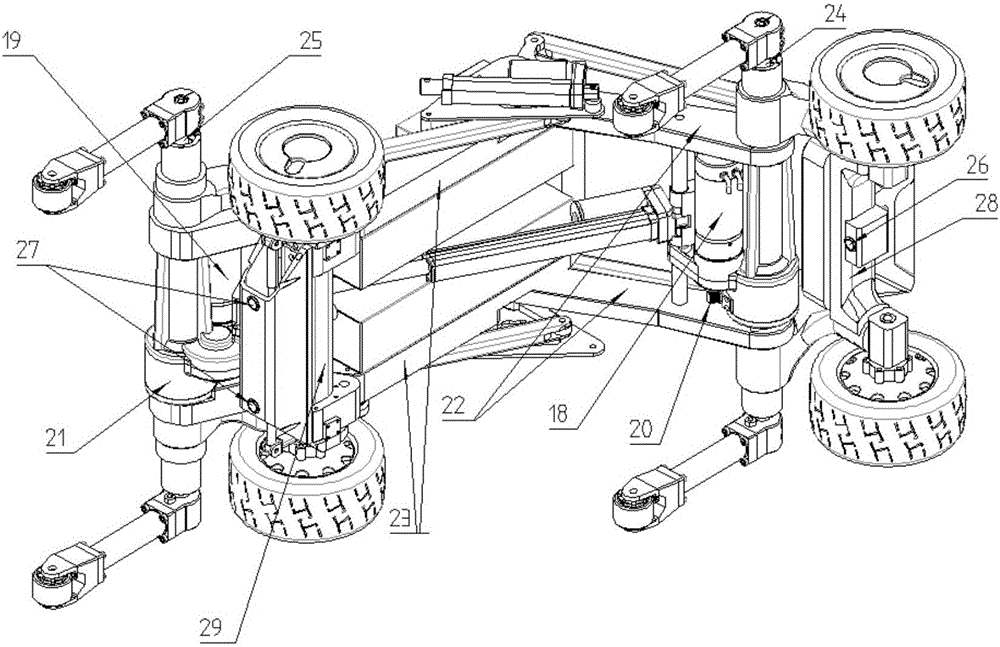
[0044] see Figure 1-4 , the present invention discloses a continuous jumping step climbing robot, which includes a support frame body 2 and a support platform arranged on the support frame body; the support platform can be used for placing objects, and can also be used for sitting people. In this embodiment, a person is taken as an example, and the supporting platform is a wheelchair seat 1 .
[0045] Wheelchair seat 1 comprises cushion, backrest and armrest, and wheelchair ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com