Heavy-duty lorry driving barrier detection and tracking method based on binocular fisheye camera
A technology of obstacle detection and binocular fish, which is applied in image enhancement, image analysis, image data processing, etc., can solve the problem of no camera description, etc., and achieve the effect of fast calculation speed, good robustness, and less calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
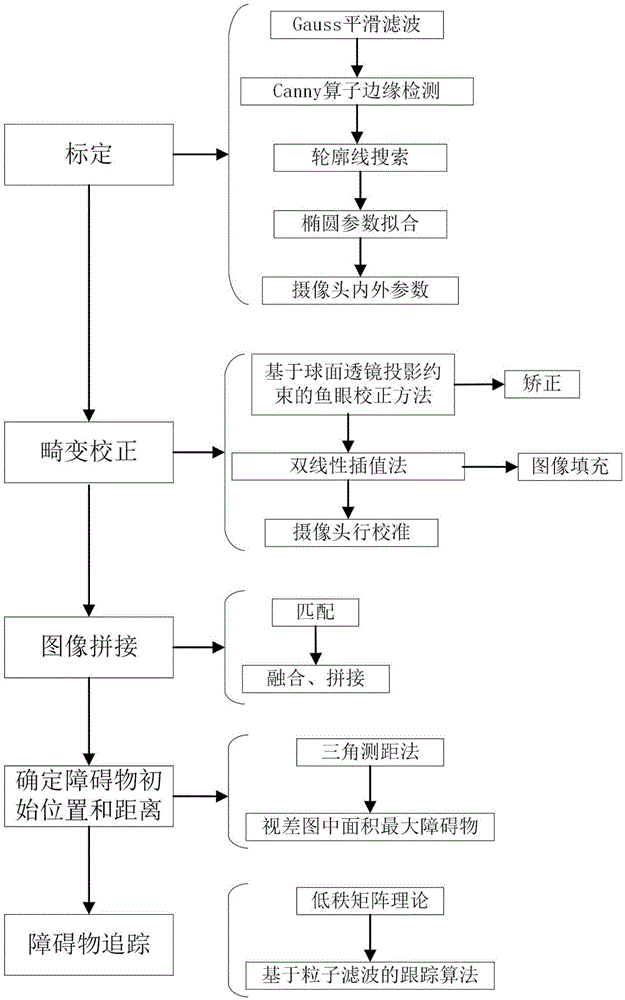
[0067] A specific embodiment of the present invention is a binocular fisheye-based method for detecting and tracking obstacles in a truck, comprising the following steps:
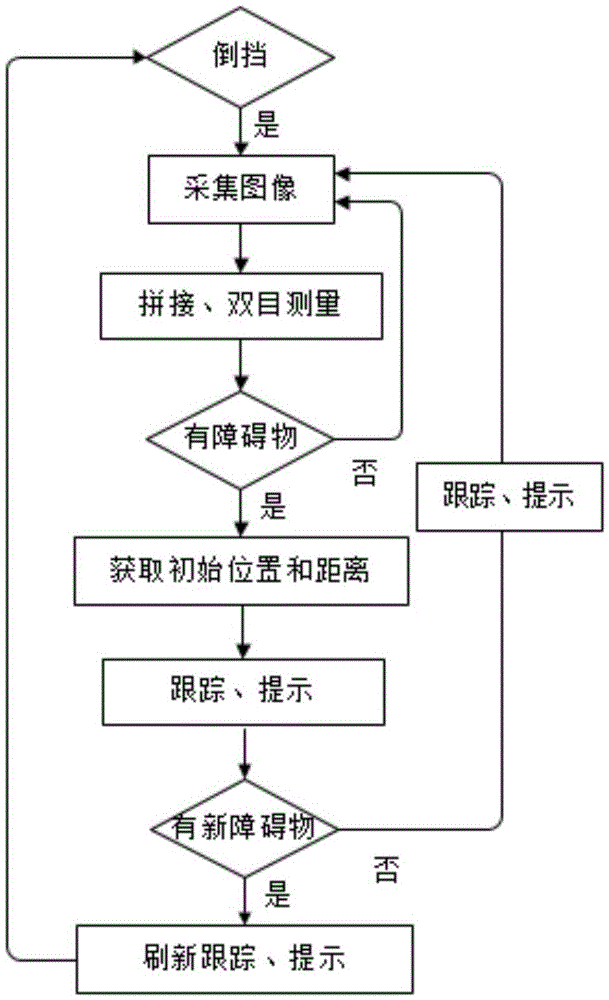
[0068] A reversing obstacle information collection
[0069] When the car's electronic control center detects that the car's gear is in reverse gear, it starts two all-weather infrared fisheye cameras with the same sampling frequency installed at both ends of the truck's rear to obtain real-time video of the car.
[0070] B binocular fisheye camera calibration
[0071] Firstly, the single-objective calibration is carried out to obtain the internal parameters of the camera (focal length, the principal point of the camera center, and the distortion vector) and the external parameters (rotation matrix and translation vector).
[0072] Since the fisheye camera has a wide imaging field of view and high distortion characteristics, the present invention proposes an algorithm that utilizes a specific ellipse calibr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com