SPS+UPU+(2RPS+R) type four-freedom-degree parallel robot
A robot and parallel technology, applied in the field of robotics, can solve the problems of reducing the stiffness of the parallel mechanism, limited translational working space, and reducing the actual working space, etc., to achieve the effect of large working space, symmetrical and simple overall structure, and large bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
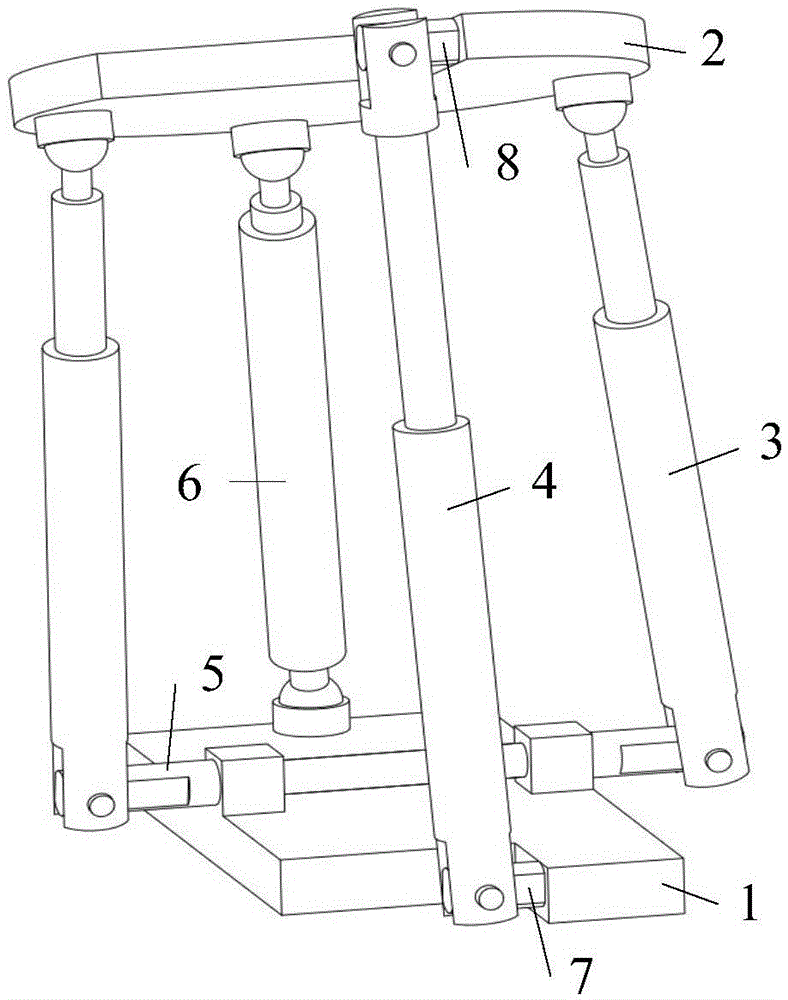
[0016] exist figure 1 In the schematic diagram of the SPS+UPU+(2RPS+R) type four-degree-of-freedom parallel robot shown, the base 1 is a rectangular plate, and an open slot is provided on the rectangular base, and a through hole A is provided on the side wall of the open slot; The middle part of the machine base is provided with a bump on both sides, and a through hole B parallel to the above through hole A is arranged on the bump, and a ball auxiliary support is arranged in the center of the rear side of the base. The open slot corresponding to the machine base is provided with a through hole C on the side wall of the open slot, and three ball sub-supports are arranged on the moving platform, the through hole C and the three ball sub-supports are evenly distributed on the same circumference Above; the SPS type branch chain 5 is a mobile electric cylinder, and its two ends are connected with the ball pair support of the machine base and the moving platform through a ball pair;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com