Scan path programming method obtained by leaf dense point cloud on basis of laser ranging
A technology of laser distance measurement and scanning path, which is applied in the field of precision measurement to achieve the effect of realizing measurement and reducing dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
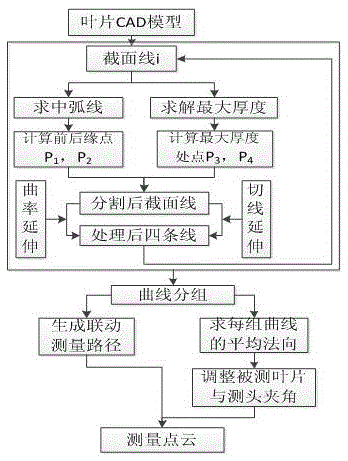
[0023] Referring to the accompanying drawings, a scanning path planning method based on laser ranging based on leaf dense point cloud acquisition, the method has the following steps to achieve:
[0024] Step 1. Take the reference plane of the blade CAD model as the starting point, intercept a set of cross-sectional contour curves of the blade profile to be measured along the Z-axis direction perpendicular to the reference plane according to the designed fixed step, and divide a set of profile curves of the blade profile to be measured The cross-sectional profile curves are arranged in sequence and marked separately;
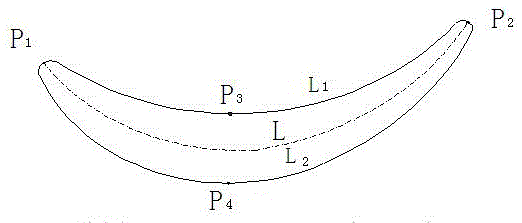
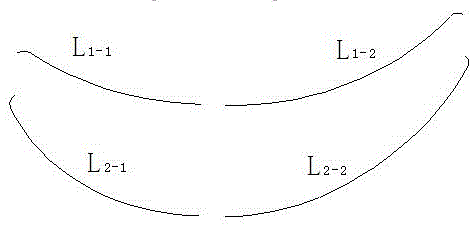
[0025] Step 2. For the cross-sectional contour curve of the blade to be measured, which is obtained in step 1 and consists of the four curves of the blade front edge, trailing edge, blade pot, and blade back, extract a set of leaf pot curves and the center of the common tangent circle of the blade back curve track, forming the middle arc L of the leaf pot curve a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com