Two-freedom-degree wheel-leg composite spherical mechanism and underwater robot
A spherical mechanism and degrees of freedom technology, applied in the field of robotics, can solve the problems of difficult sealing and packaging of joint drive motors, large self-weight-to-load ratio, complex leg mechanism, etc., and achieve a compact wheel-leg composite structure, fast response speed, and no joints. and driven effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
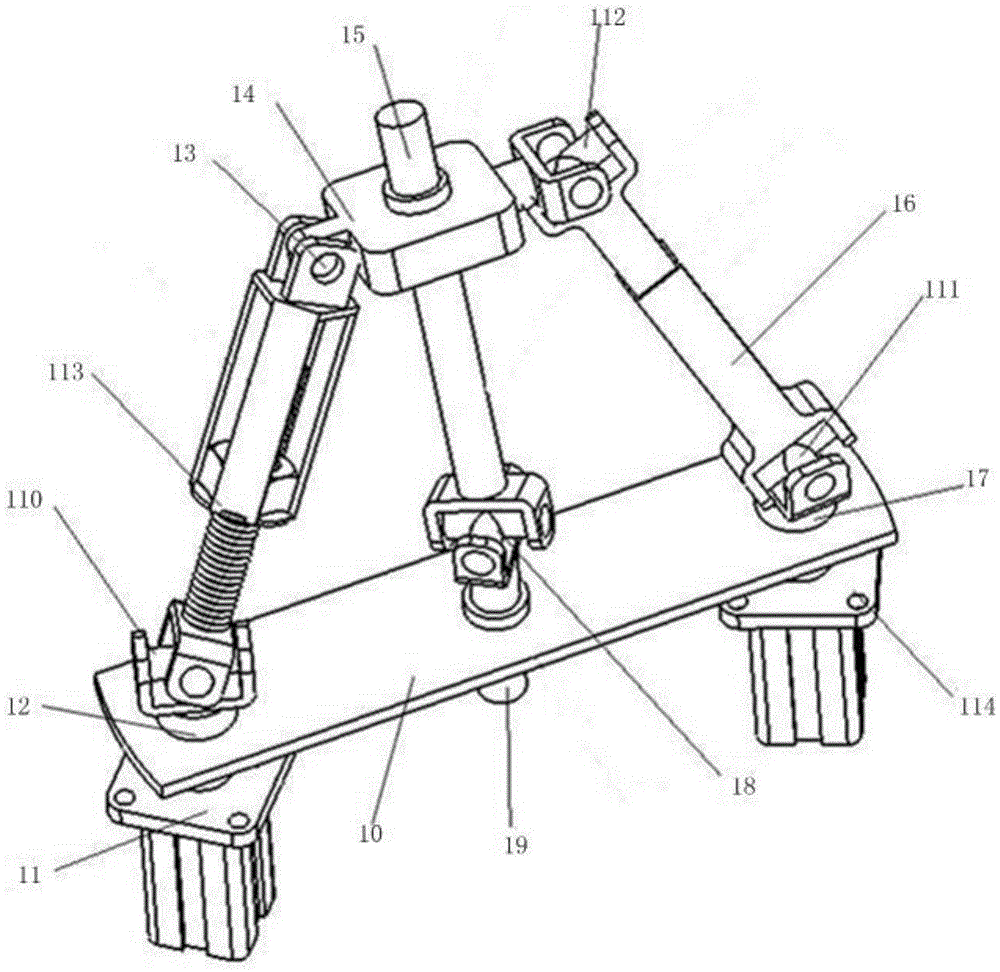
[0022] like figure 1 As shown, in the present embodiment, the static platform 10 is elongated, and the dynamic platform 14 is square;
[0023] The first drive branch is the RUHR movement branch, the second drive branch is the RUPU movement branch, the first drive branch and the second drive branch are active drive branches, the RUHR movement branch and the RUPU movement branch are symmetrical arrangement;
[0024] Between one end of the static platform 10 and one end of the moving platform 14, a first rotating pair 12, a second universal joint 110, a first screw pair 113 and a third rotating pair 13 are arranged in sequence, thereby forming a RUHR motion branch chain, wherein the first A rotary pair 12 is driven by the first motor 11 arranged on the static platform 10;
[0025] The second rotating pair 17, the third universal joint 111, the first moving pair 16 and the fourth universal joint 112 are sequentially arranged between the other end of the static platform 10 and th...
Embodiment 2
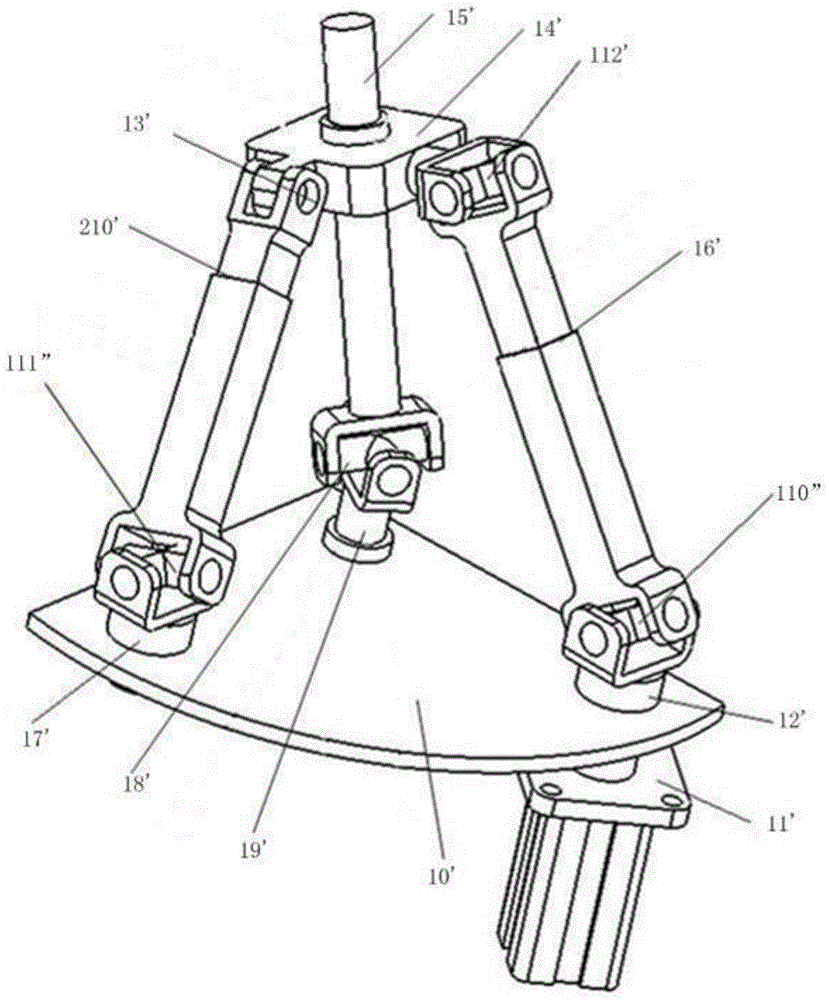
[0028] like figure 2 As shown, in the present embodiment, the static platform 10' is a 1 / 4 circle, and the moving platform 14' is a square shape;
[0029] The first drive branch is RUPU motion branch, the second drive branch is RUPR movement branch, the first drive branch is active drive branch, the second drive branch is passive drive branch; RUPU movement branch and RUPR The vertical arrangement of the movement branch chain;
[0030] Between the arc-shaped end of the static platform 10' and one side of the moving platform 14', there are sequentially arranged a first rotating pair 12', a second universal joint 110', a first moving pair 16' and a fourth universal joint 112 ', thereby forming a RUPU kinematic branch chain, wherein the first revolving pair 12' is driven by the first motor 11' arranged on the static platform 10';
[0031] The second rotating pair 17', the third universal joint 111', the second moving pair 210' and the third rotating pair 13 are sequentially ar...
Embodiment 3
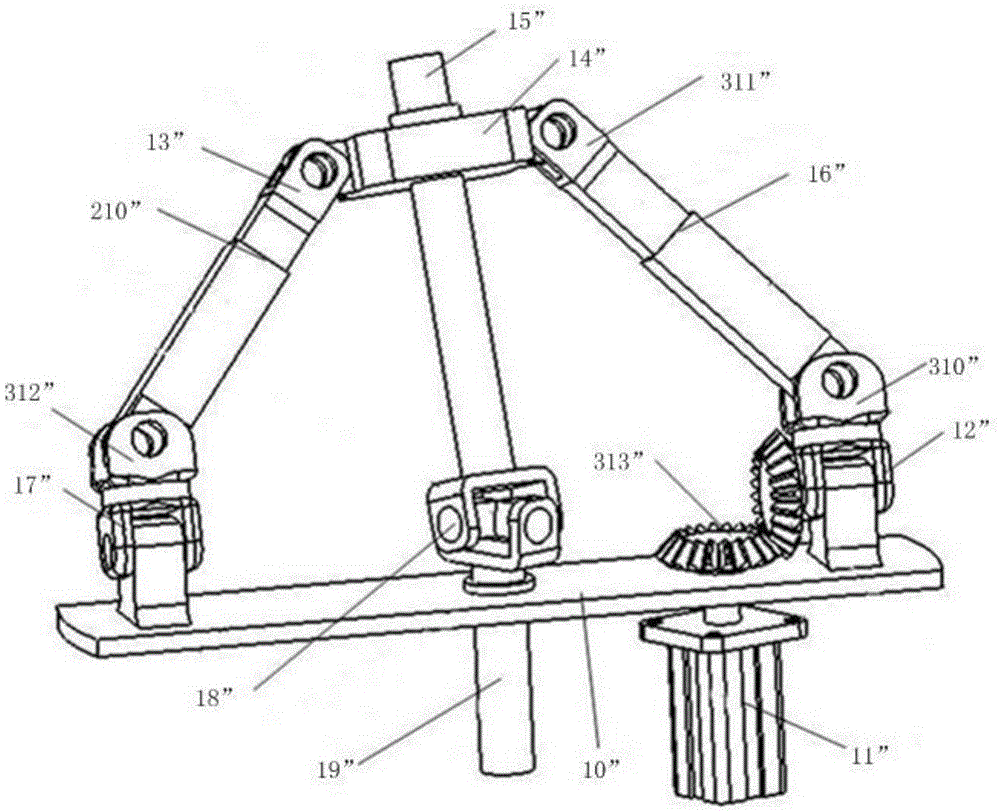
[0034] like image 3 As shown, in the present embodiment, static platform 10 " is strip shape, and moving platform 14 " is square shape;
[0035] Both the first drive branch and the second drive branch are RRPR motion branches, the first drive branch is the active drive branch, the second drive branch is the passive drive branch, the first drive branch and the second drive branch Chain symmetrical arrangement;
[0036] Between one end of the static platform 10" and one end of the moving platform 14", a first rotating pair 12", a fourth rotating pair 310", a first moving pair 16" and a fifth rotating pair 311" are sequentially arranged to form a first Drive the branch chain, wherein the first revolving pair 12" is driven by the first motor 11" arranged on the static platform 10";
[0037] The second rotating pair 17", the sixth rotating pair 312", the second moving pair 210" and the third rotating pair 13" are sequentially arranged between the other end of the static platform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com