Gaussian distribution based mobile robot simultaneous localization and mapping method
A mobile robot, Gaussian distribution technology, applied in the direction of road network navigator, etc., can solve the problem of lack of particles and increase the calculation time, and achieve the effect of ensuring the diversity of particles, reducing the calculation pressure and reliable estimation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] Below in conjunction with accompanying drawing, the present invention will be further described:
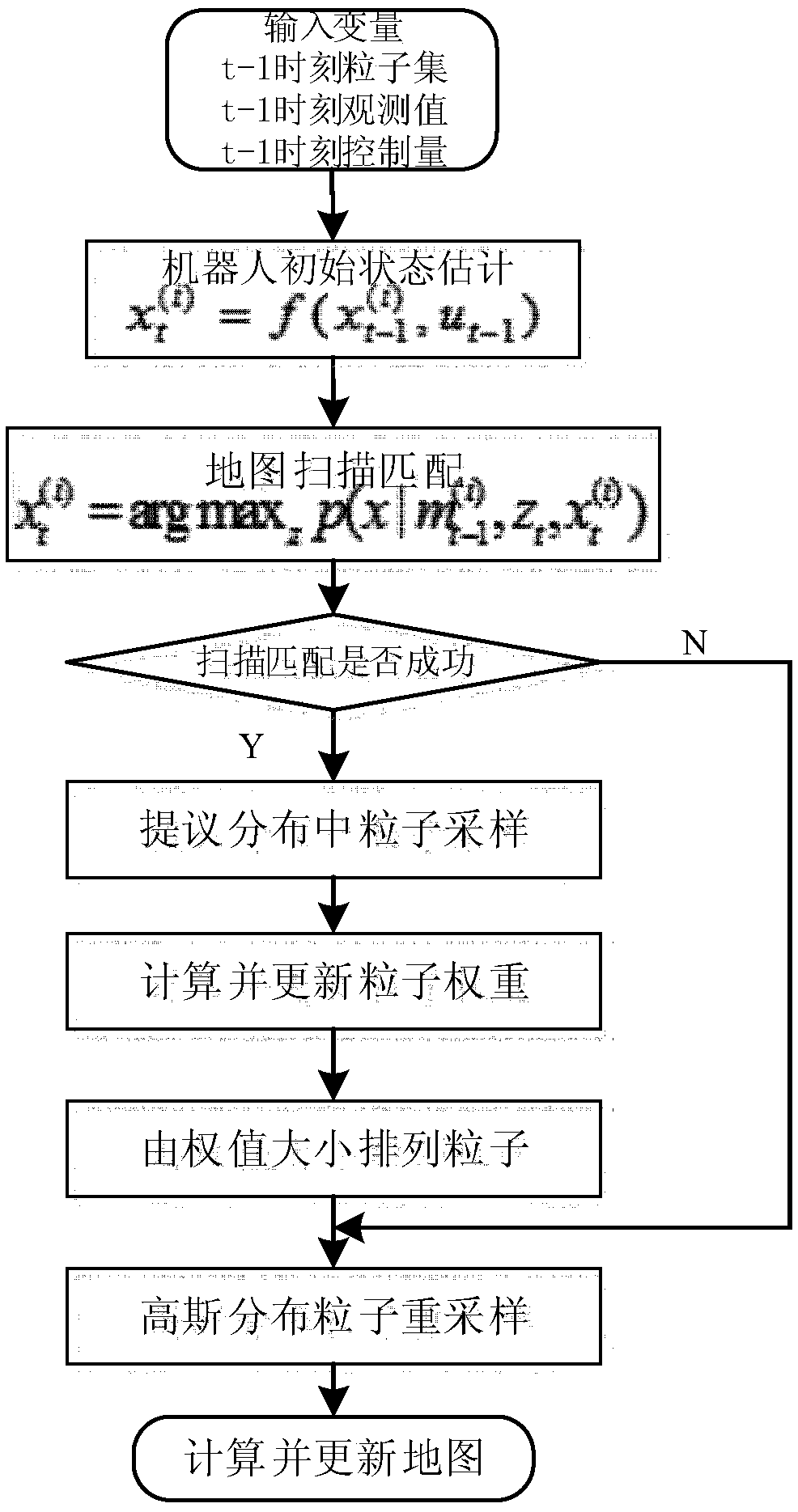
[0041] Such as figure 1 As shown, the present invention provides a kind of Gaussian distribution based mobile robot synchronous positioning and map construction, it is characterized in that, comprises the following steps:
[0042] S1, the input amount is the particle set at time t-1, the observed value at time t-1 and the control amount applied at time t-1, determined by the robot pose and odometer control information u t-1 Estimating the initial pose of the robot
[0043] S2, execute the scan matching method according to the map, by To judge whether the scan matching is successful; the steps of the scan matching method are:
[0044] Firstly, the pose of the robot is estimated by the posterior distribution recursive Bayesian filter combined with the sensor data, and the initial sample set is formed as follows:
[0045] x t ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com