Six-DOF (degrees of freedom) three-dimensional-manipulation robot
A degree of freedom and robotic technology, applied in the field of robotics, can solve problems such as unsuitable for high-speed reciprocating transmission, low transmission efficiency of trapezoidal screw, small working space of robots, etc., and achieve the effect of simple structure, large reduction ratio and large working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
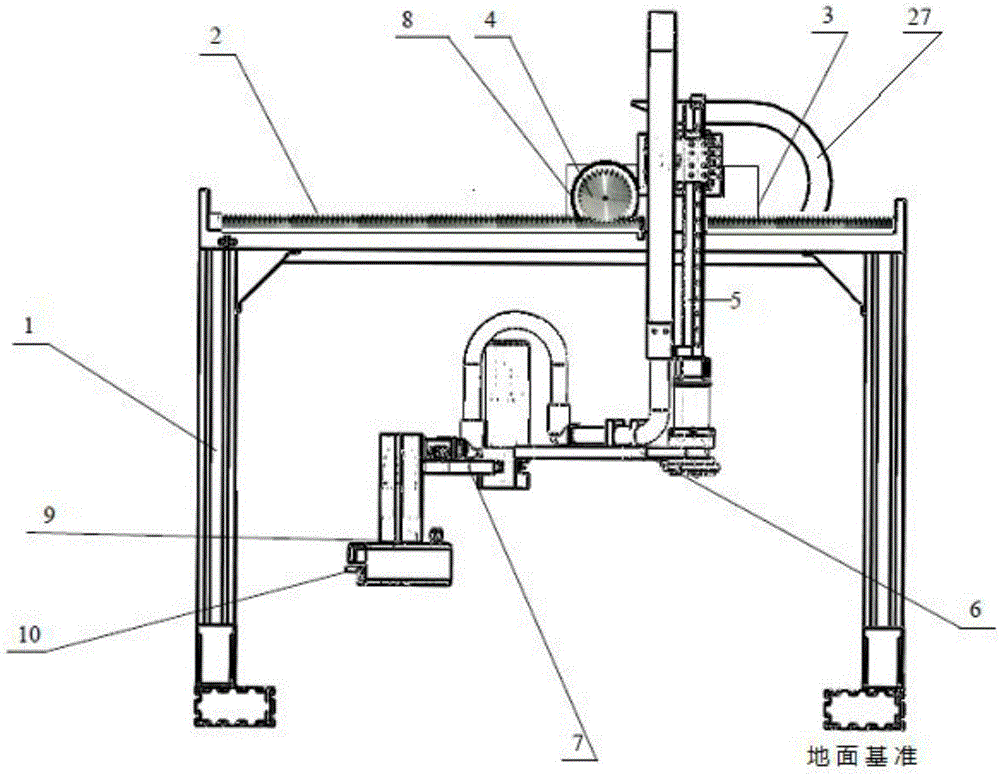
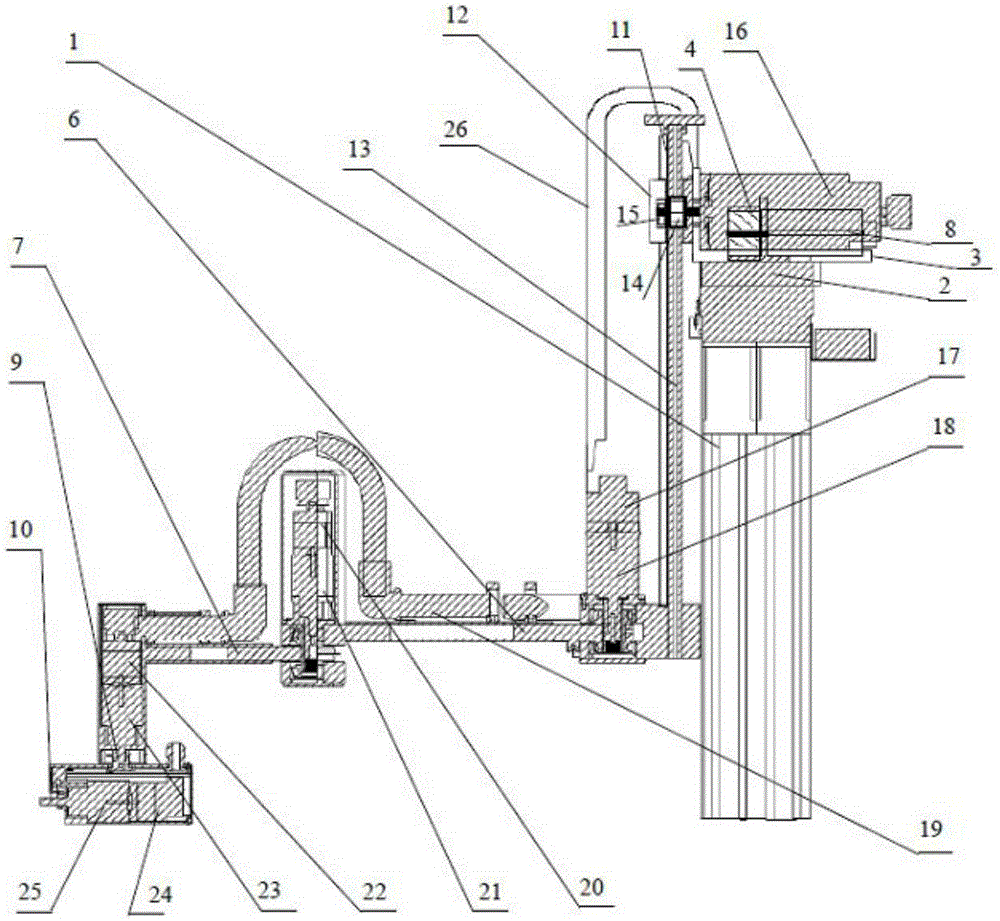
[0036] The invention provides a three-dimensional operation robot with six degrees of freedom, which has the advantages of simple structure, high reliability, high end positioning accuracy, large working space, high flexibility, low cost and the like. Install the corresponding end effector at the end of the robot to complete various tasks such as 3D printing, food processing, handling, assembly, welding, gluing, and agricultural automation.
[0037] The embodiments of the present invention are described in detail below, and the following embodiments are based on the technical solutions of the present invention, and provide detailed implementation methods and specific operation processes. It should be noted that any equivalent modification, replacement, variation and improvement made by those skilled in the art without departing from the concept of the present invention shall fall within the protection scope of the present invention.
[0038] see figure 1 , the six-degree-of-fre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com