Automatic parking locus optimization method based on full-simultaneous dynamic optimization framework
A dynamic optimization and autonomous parking technology, applied in data processing applications, prediction, calculation, etc., can solve problems that are not necessarily feasible, cannot implement parking time optimization, and the collision-free path does not necessarily meet the kinematic constraints and physical constraints of the car, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with accompanying drawings and examples of implementation.
[0065] refer to Figure 4 , a kind of autonomous parking trajectory optimization method based on full simultaneous dynamic optimization framework described in the present invention, comprises the following steps:
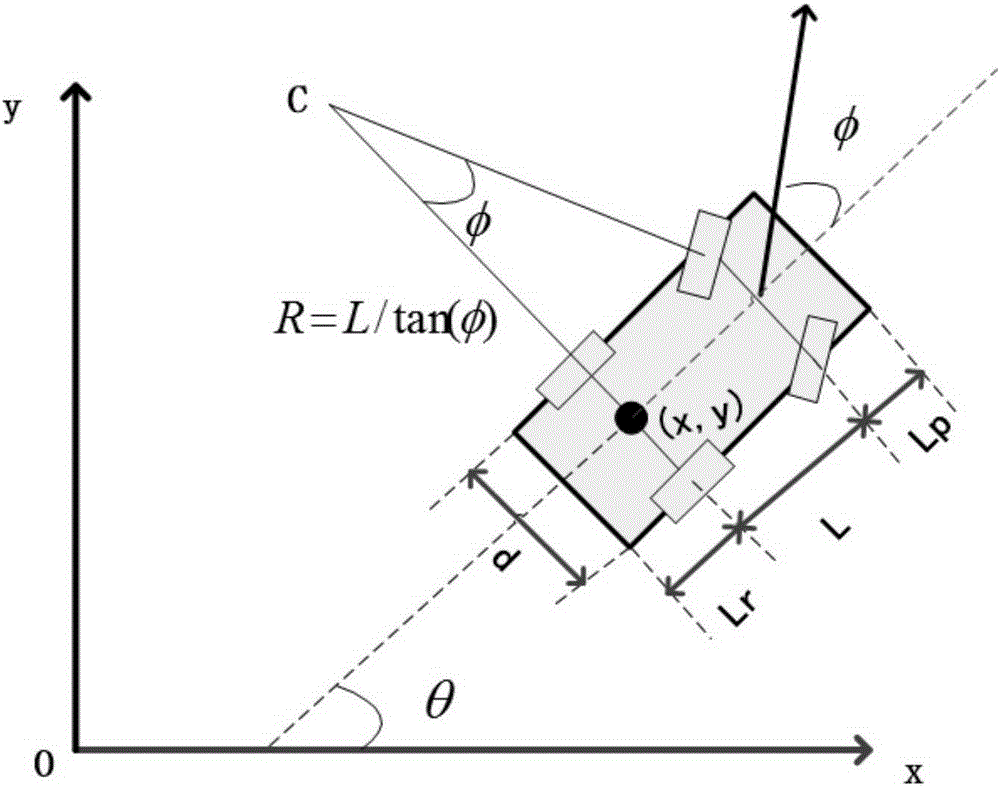
[0066] 1. Establish the low-speed kinematics model of the vehicle in the autonomous parking process, also known as the non-holonomic constraint model. Such as figure 1 , the present invention establishes its kinematics differential equation model based on the front-wheel drive trolley as shown in formula (1). (x, y) are the coordinates of the center point of the rear wheel axle of the trolley; v, a are the longitudinal velocity and acceleration of the center point of the front axle; And the angular velocity, here it is assumed that the steering angles of the two front wheels are approximately equal, so the above model is also ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com