Three-section machine body type hexapod robot with transportation function and operation function fused
A hexapod robot, three-stage technology, applied in the field of robots, can solve the problems of single function and fixed rigid body structure of the robot, and achieve the effect of improving the flexibility of movement, increasing the movement space, and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
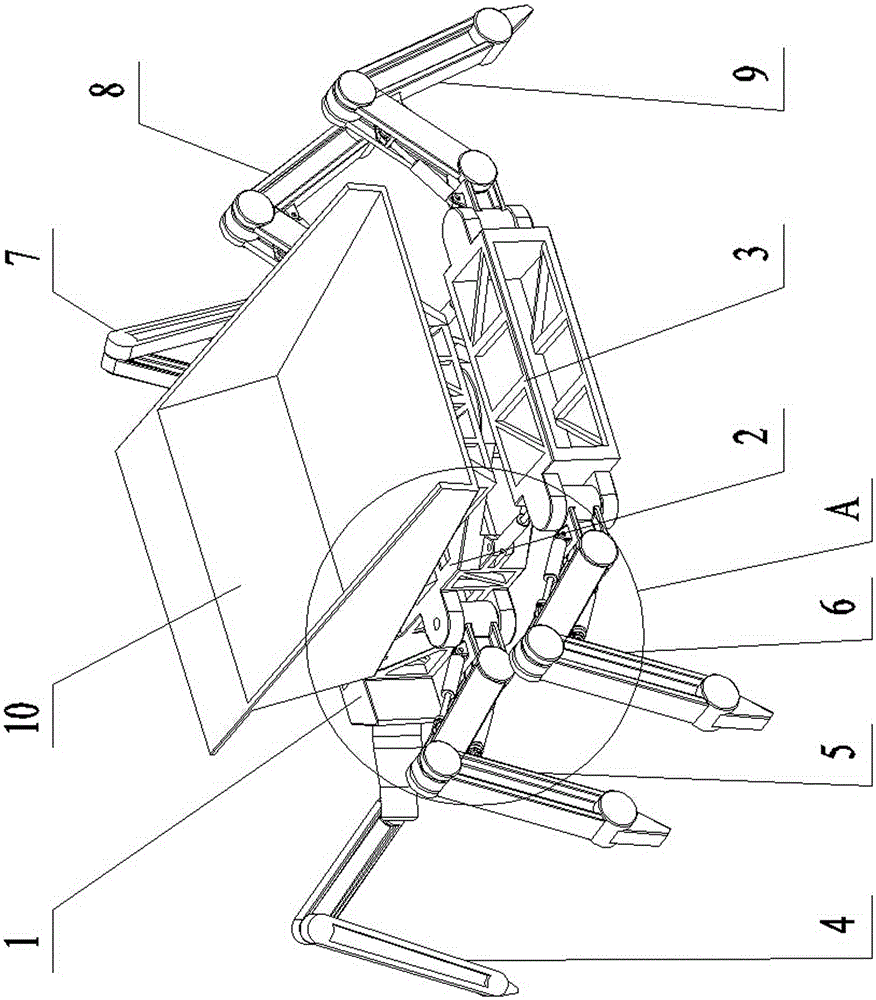
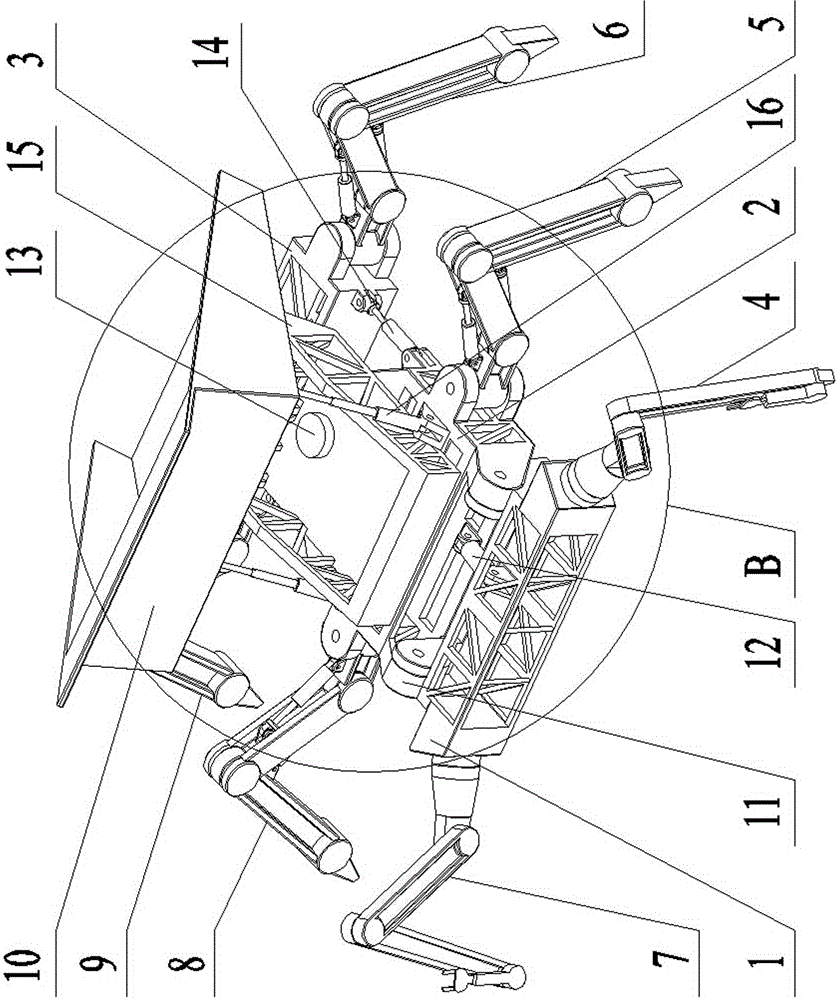
[0021] Specific implementation mode one: as Figure 1~Figure 6 As shown, a three-segment body type hexapod robot integrating transportation and operation functions in this embodiment includes two front legs (both front legs are leg-arm fusion legs), two middle legs and two For the hind legs, the two front legs are respectively the left front leg 4 and the right front leg 7, the two middle legs are respectively the left middle leg 5 and the right middle leg 8, and the two rear legs are respectively the left rear Leg 6 and right rear leg 9; the three-section body type hexapod robot with integrated transportation and operation functions also includes a dump bucket 10, a front drive joint 11, a middle drive joint 13, a rear drive joint 15 and a three-section body , the three-section body is respectively a front trunk 1, a middle trunk 2 and a rear trunk 3;
[0022] The front trunk 1 is rotationally connected with the middle trunk 2 through the front drive joint 11 (the front driv...
specific Embodiment approach 2
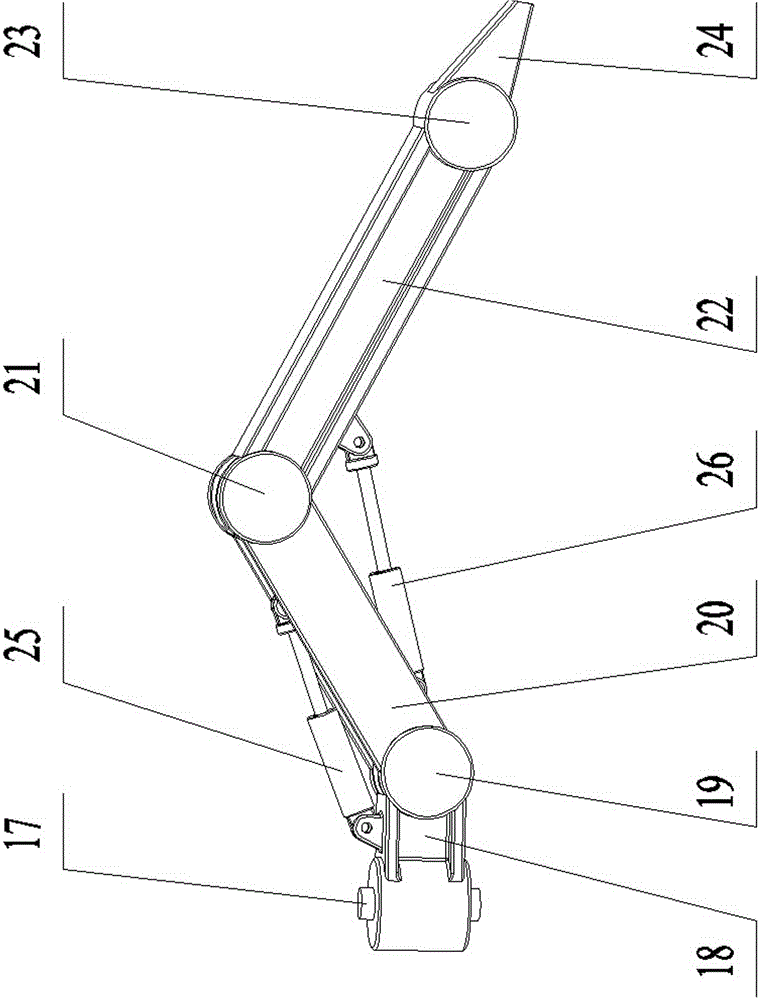
[0025] Specific implementation mode two: as Figure 1~Figure 3 As shown in the first embodiment, a three-segment body type hexapod robot integrating transportation and operation functions, the left middle leg 5, left rear leg 6, right middle leg 8 and right rear leg 9 have the same structure , and all include leg driving joint one 17, base joint one 18, leg driving joint two 19, thigh one 20, leg driving joint three 21, calf one 22, leg passive joint one 23 and foot one 24;
[0026] The leg driving joint one 17, the base joint one 18, the leg driving joint two 19, the thigh one 20, the leg driving joint three 21, the calf one 22, the leg passive joint one 23 and the foot one 24 are arranged in sequence, and the leg driving joint one The driver of 17 is arranged in base section one 18, and described base section one 18 is hinged with leg driving joint two 19, and described leg driving joint two 19 is hinged with one end of thigh one 20, and the other end of described thigh one 20...
specific Embodiment approach 3
[0028] Specific implementation mode three: as Figure 1~Figure 3 , Figure 5 and Figure 6 As shown, a three-segment body type hexapod robot that integrates transportation and operation functions described in the second embodiment, the driver of the leg-driven joint 17 is a conventional motor; the linear drive of the leg-driven joint 2 19 The linear driver 26 of the driver 25 and the leg-driven joint three 21 is a hydraulic driver.
[0029] Specific implementation mode three: as figure 1 , figure 2 , Figure 4~Figure 6 As shown, a three-segment body type hexapod robot with integrated transportation and operation functions described in the second or third specific embodiment, the left front leg 4 and the right front leg 7 have the same structure, and both include leg drive joints 4 27, Base section two 28, leg driving joint five 29, thigh two 30, leg driving joint six 31, calf two 32, leg passive joint seven 33, foot two 34, leg driving joint eight 35 and pawl 36; describ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com