Thirteen-degree-of-freedom head mechanism of humanoid robot
A technology of humanoid robot and degree of freedom, applied in manipulators, manufacturing tools, etc., can solve the problems of low motion precision, poor flexibility, and low coordination of the overall mechanism, and achieve the effect of good motion coordination and improved motion flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
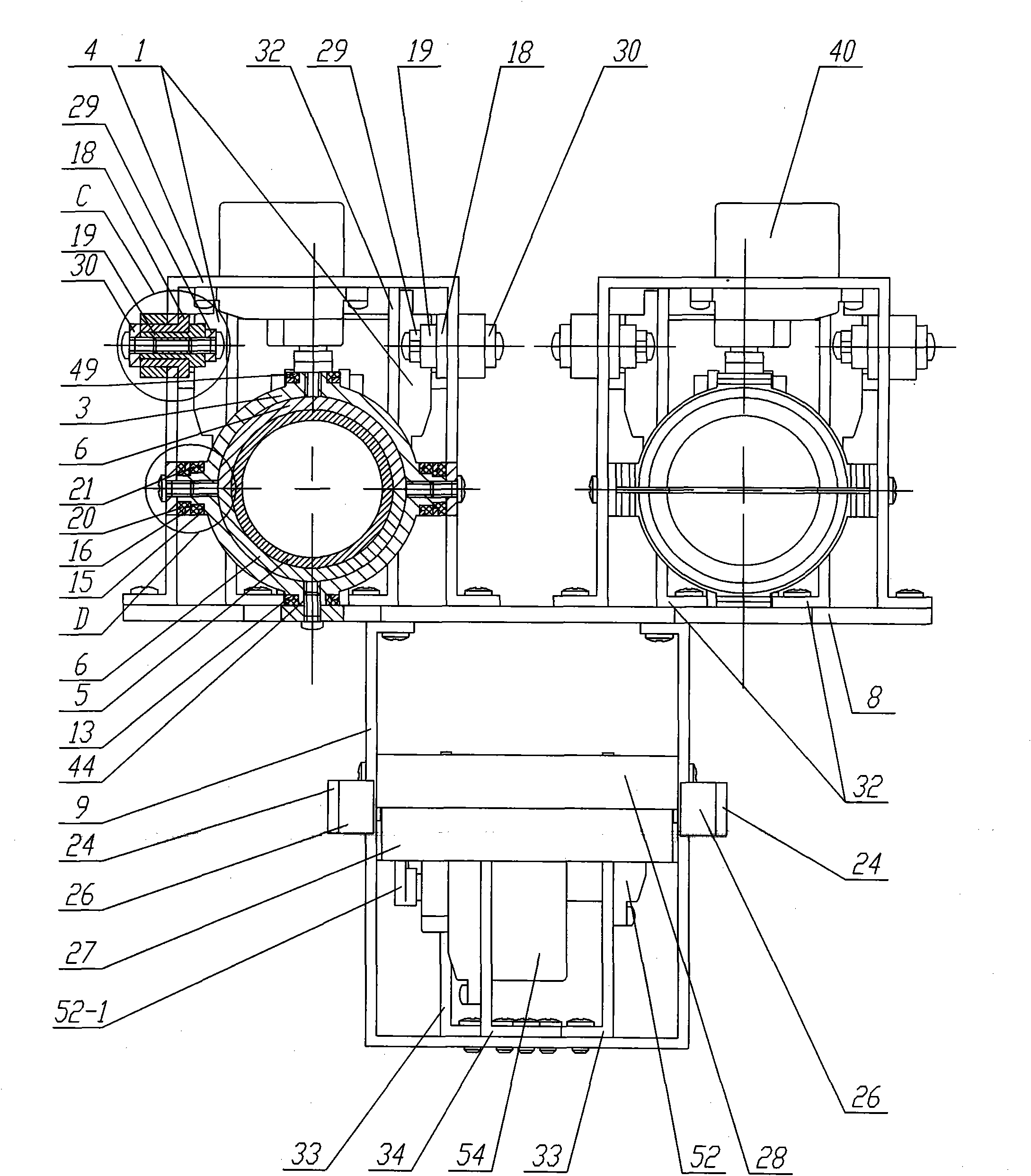
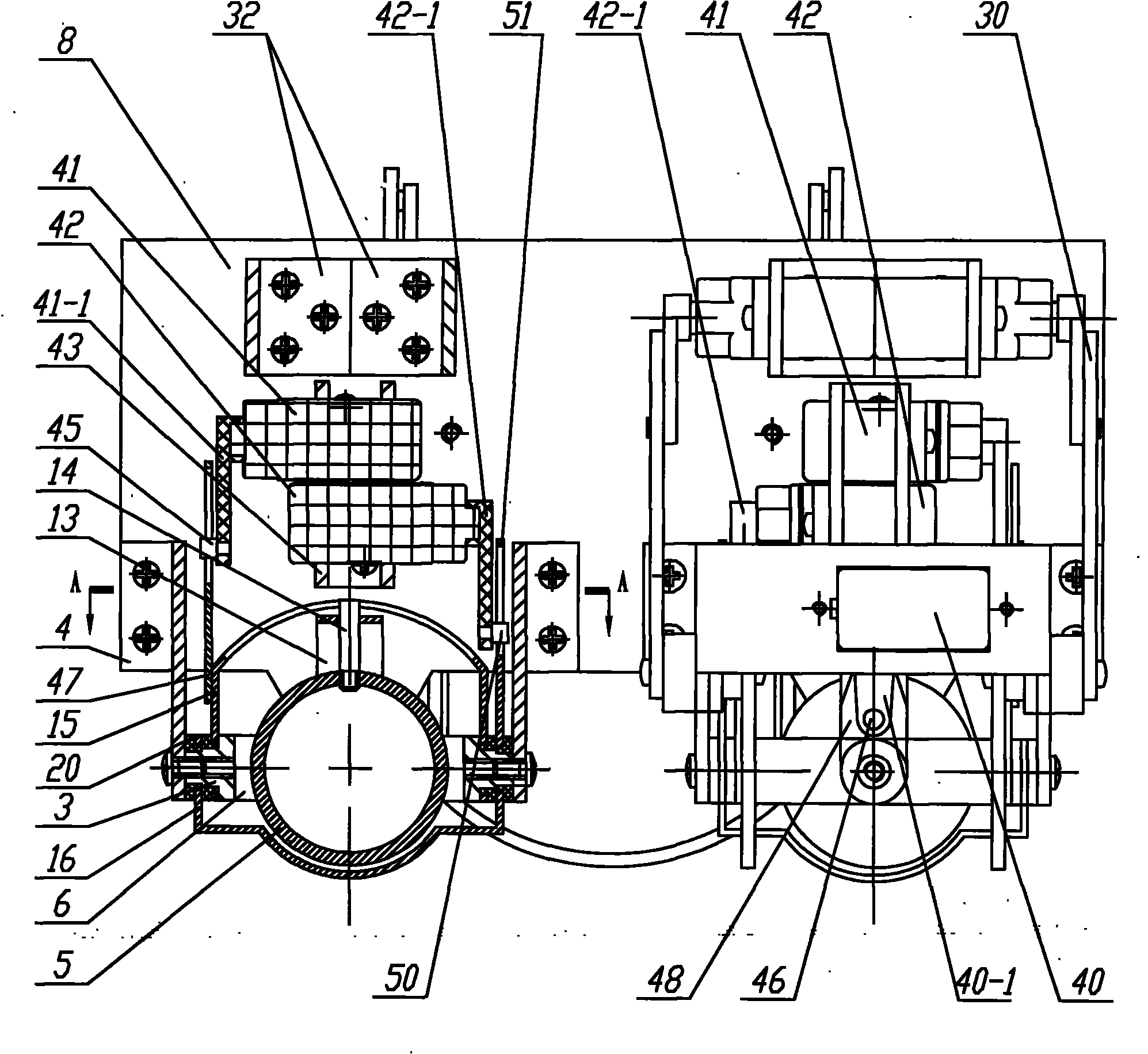
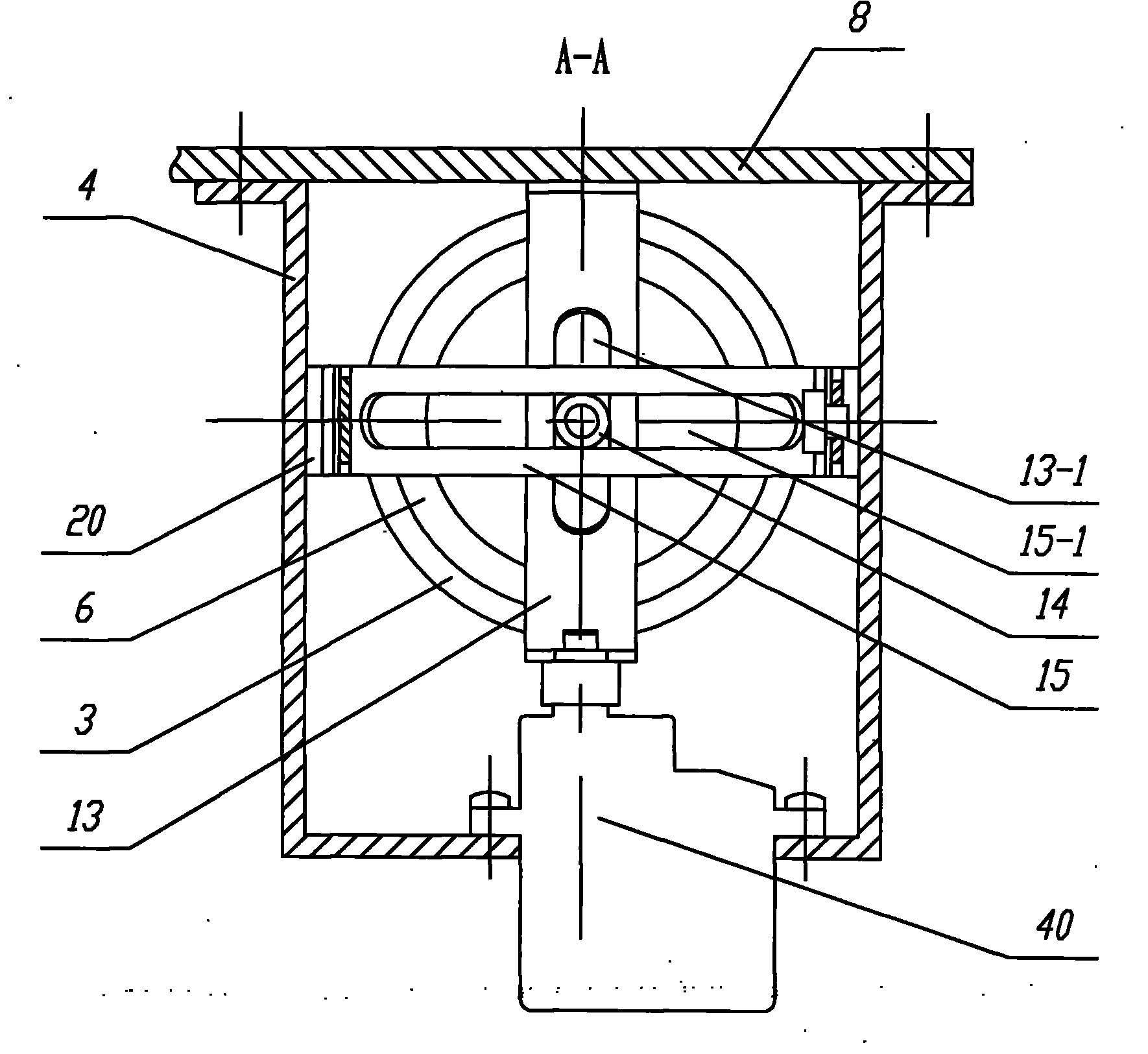
[0012] Specific implementation mode one: combine Figure 1 to Figure 7 Describe this embodiment, the thirteen degrees of freedom humanoid robot head mechanism of this embodiment is made up of two eyebrow mechanisms, two eye movement mechanisms, mouth mechanism and base plate 8; An eyebrow servo steering gear 1, two eyebrow sliding pins 12, two eyebrow swing bars 30, two eyebrow shafts 19, two eyebrow axle sleeves 18 and two eyebrow support rods 29 are formed; each eye movement mechanism is composed of eye supports 4. Two eyeball servo steering gears, eyelid servo steering gear 42, eyeball steering gear bracket 43, eye socket 3, four eye socket shafts 44, two eye ball sliding pins, outer slip ring 15, outer slip ring swing rod 47, two Outer slip ring bushing 21, inner slip ring 13, inner slip ring swing rod 48, two inner slip ring bushings 49, eyeball swing rod 14, eyeball 5, eyeball sleeve 6, eyelid support frame 16, two eyelid bushings 20. The eyelid sliding pin 50 and the e...
specific Embodiment approach 2
[0018] Specific implementation mode two: combination figure 1 Describe this embodiment, this embodiment takes the horizontal center axis of the eyebrow axis 19 as a reference, and the front end of the eyebrow support rod 29 swings up and down within +5mm--5mm. Such setting can meet the design requirements.
specific Embodiment approach 3
[0019] Specific implementation mode three: combination figure 1 Describe this embodiment, this embodiment takes the vertical center axis of the circular eye socket 3 as a reference, and the left and right rotation range of the eyeball 5 is between +40°~-40°. Such setting can meet the design requirements. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com