Posture measuring system for external-skeleton follow-up control and use method thereof
A measurement system and exoskeleton technology, applied in medical science, prosthesis, etc., can solve problems such as large amount of calculation, and achieve the effect of high precision, simplified system, and real-time monitoring of walking posture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Further describe the technical scheme of the present invention in detail below in conjunction with accompanying drawing:
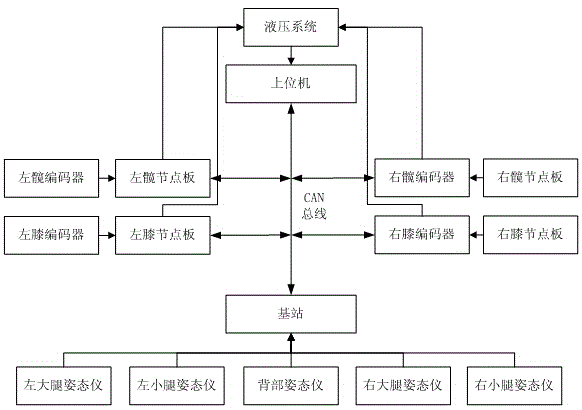
[0029] Such as figure 1 As shown, an attitude measurement system for exoskeleton follow-up control, which includes a right calf attitude instrument, a right thigh attitude instrument, a left calf attitude instrument, a left thigh attitude instrument, an upper body attitude instrument, a left hip encoder, a right hip Encoder, left knee encoder, right knee encoder, left hip joint plate, right hip joint plate, left knee joint plate, right knee joint plate, data receiving device, data processing device and power subsystem; said right lower leg The posture instrument, the right thigh attitude instrument, the left calf attitude instrument, the left thigh attitude instrument, and the upper body attitude instrument respectively send the attitude data of the human body's right calf, right thigh, left calf, left thigh and upper body to the data processing dev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com