Acceleration-deceleration interpolation algorithm for robot control system trajectory
A control system and interpolation algorithm technology, which is applied in general control systems, control/regulation systems, computer control, etc., can solve problems such as abrupt changes in acceleration, poor interpolation accuracy, and complex calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
[0026] A trajectory acceleration and deceleration interpolation algorithm for a robot control system, comprising the following steps:
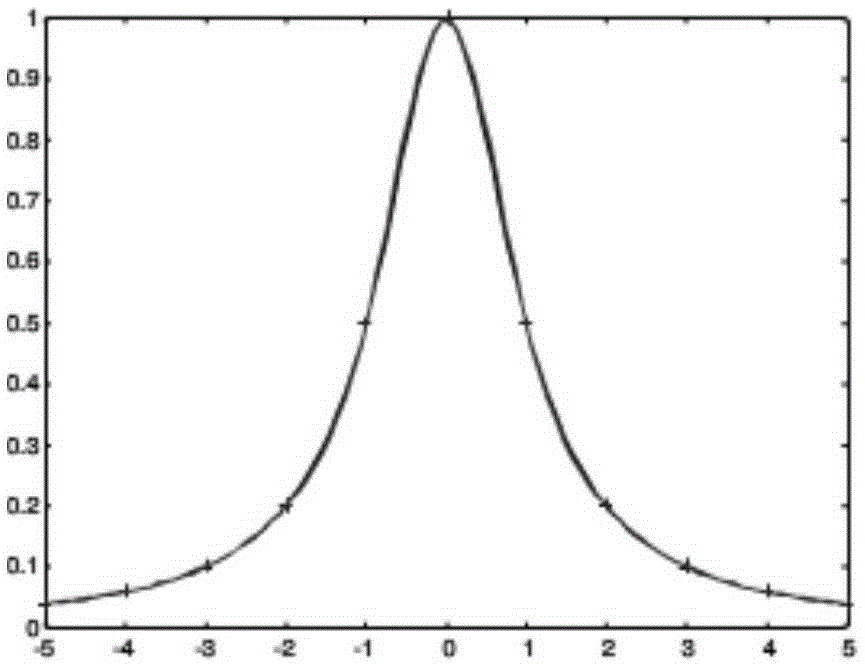
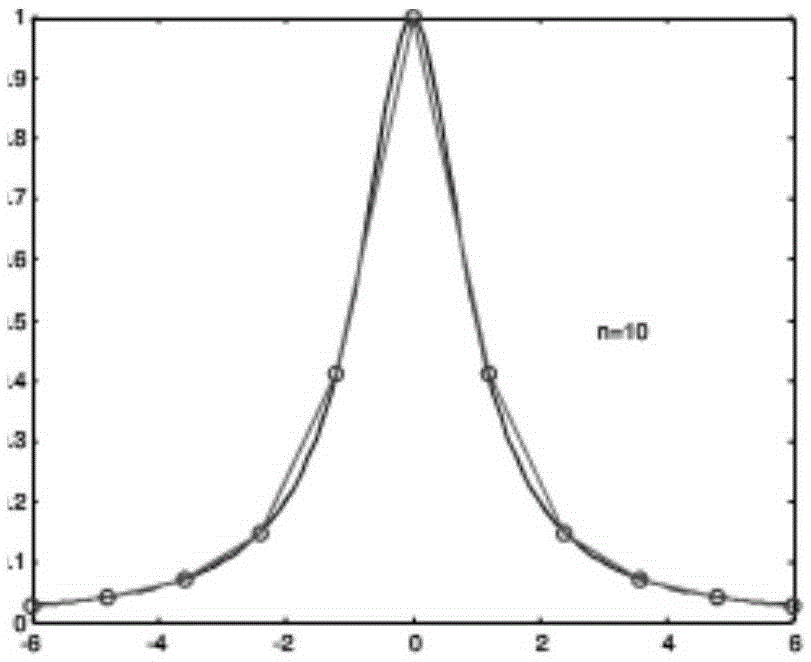
[0027] 1. Smooth curve. The interpolation trajectory first uses cubic spline spline interpolation to make the curve smooth, and the function values at each node (spline interpolation point) and the derivative information at the two boundaries are given to obtain curves with different smoothness. The smoother the curve, the faster the speed. faster. The cubic spline used here is a standard interpolation method, whether in the interval or on the boundary, its first derivative dy / dx is smooth, and the second derivative d 2 y / dx are continuous. The reason why we do not use piecewise linear interpolation here is that each node is connected by a broken line. The smaller the angle between the broken line at t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com