Multi-camera global calibration method based on high-precision auxiliary cameras and ball targets
A global calibration and multi-camera technology, applied in image enhancement, image analysis, image data processing, etc., can solve problems such as difficult on-site operation, and achieve the effect of easy operation, high precision and good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0079] 2.1 Center distance measurement experiment
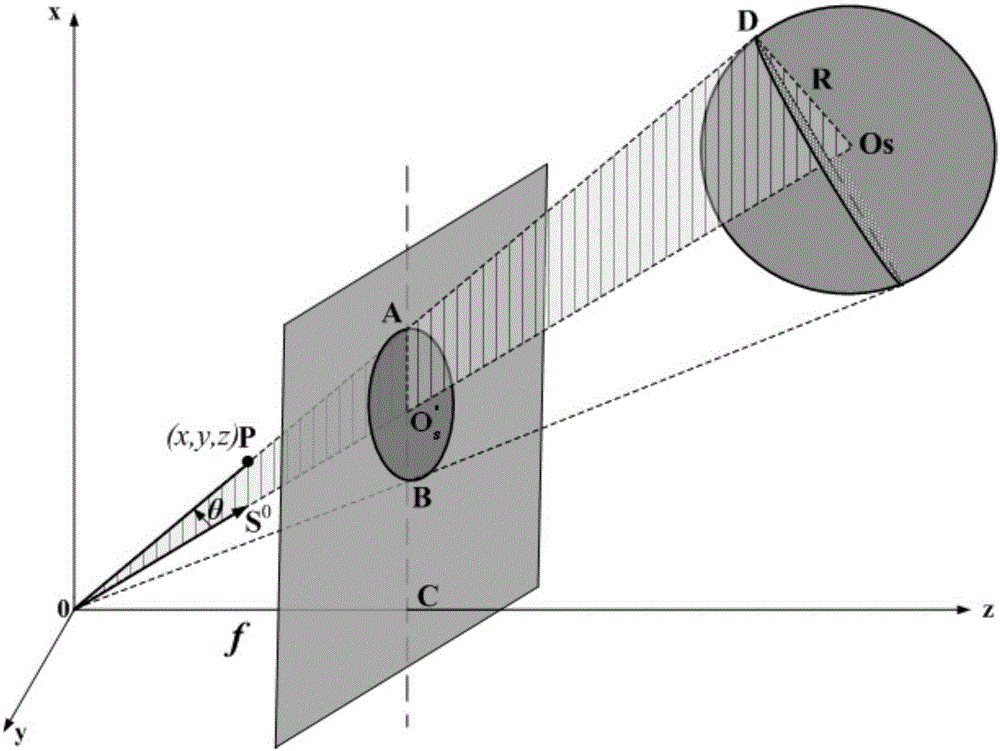
[0080] The radius and three-dimensional coordinates of the spherical target used in the experiment of this embodiment have been accurately measured. A single camera is used to capture the image of the spherical target, and then the three-dimensional coordinates of the spherical center in the camera coordinate system are calculated, and then the two spherical coordinates are calculated. The Euclidean distance of the center and compare it with the known distance of the center of the sphere. Then measure multiple times to calculate the relative error and root mean square error, so as to evaluate the accuracy of the reconstruction of the center of the sphere.
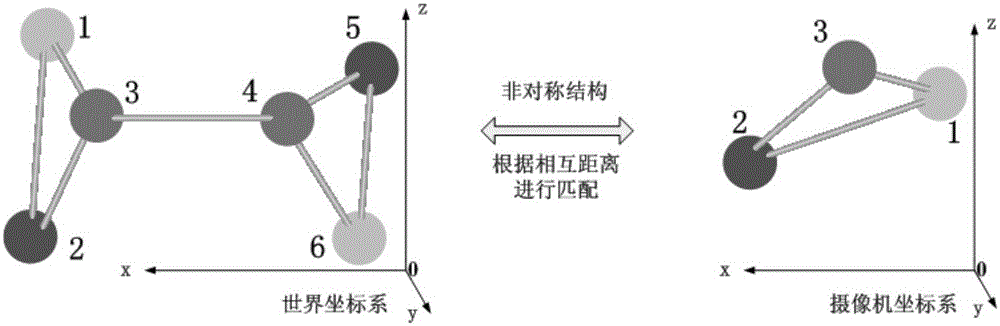
[0081] Ball targets and their numbers used in the experiment are as follows: Figure 4 shown. According to the measurement by the Institute of Metrology, the diameter of the No. 1 ball target is 40.325mm, and the three-dimensional coordinates are (0.010, 0.019, 0.000); t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com