Robot dexterous hand driving module and control method
A technology of motor drive module and drive module, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor operability, high cost, and poor versatility, and achieve strong load capacity, low hardware cost, and high operating reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
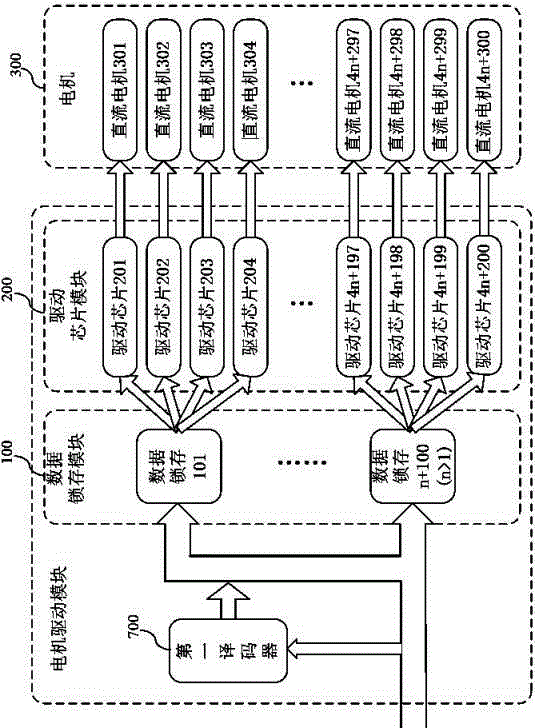
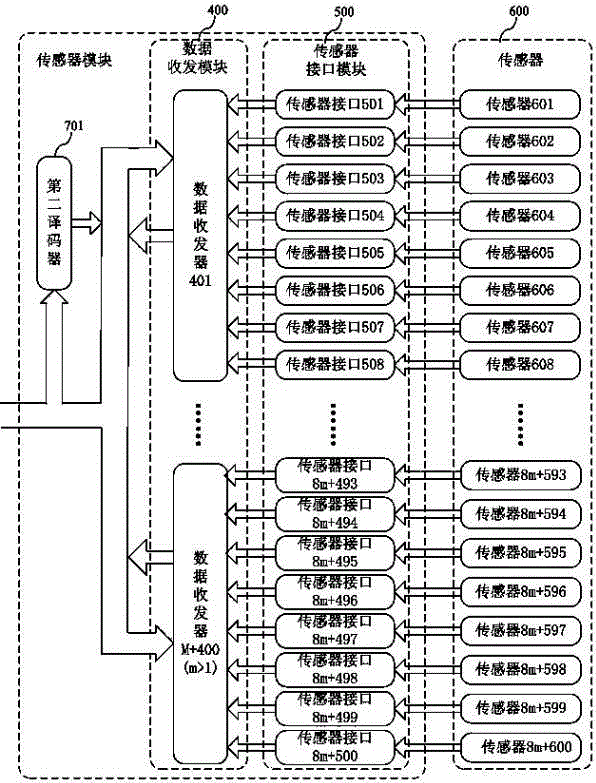
[0037] see Figure 8 , the present invention takes the five-finger fourteen-degree-of-freedom multi-sensor robot dexterous hand as an embodiment of the control object. The dexterous hand has fourteen DC motors and forty-eight sensors, and the forty-eight sensors include twenty-eight position sensors, There are thirteen touch sensors, five temperature sensors, and two humidity sensors. The drive module in this embodiment can process information from forty-eight sensors and drive fourteen DC motors. Of course, the number of processing sensors and driving DC motors can vary freely. The requirements of robot dexterous hands with different degrees of accuracy and number of sensors change.
[0038] see figure 1 , the drive module 10000 of a robot dexterous hand in this embodiment includes a bus interface 900, a motor drive module and a sensor module; the bus interface 900 is electrically connected to the motor drive module and the sensor module through a bus; the motor drive module...
Embodiment 2
[0051] Other structures of this embodiment are the same as embodiment one except the following features: see Figure 5 , the controller 1 of this embodiment is set in the drive module 10001, that is, the drive module 10001 integrates the controller 1 into one body.
Embodiment 3
[0053] Other structures of this embodiment are the same as embodiment one except the following features: see Figure 7 , the control instruction of the controller 1 in this embodiment comes from the remote controller 3; the remote controller 3 sends the control instruction to the controller 1, and the controller 1 analyzes the instruction and controls the driving module 10000 to drive the robot dexterous hand.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com