Under-actuated running gear and turning control method thereof
A technology of a walking device and a control method, applied in the field of robots, can solve the problems of high energy consumption, heavy steps, and high energy consumption, and achieve the effect of reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
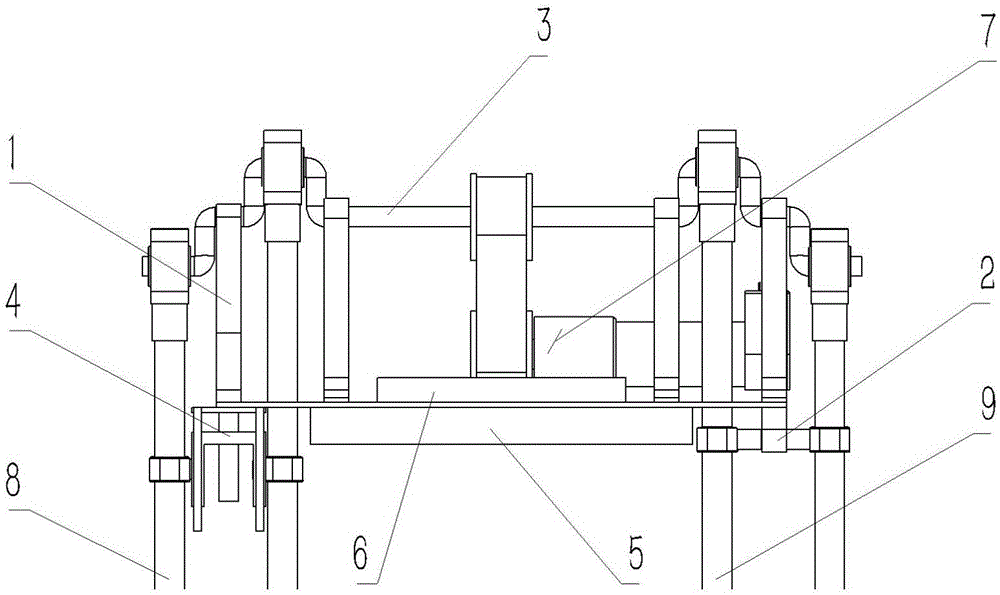
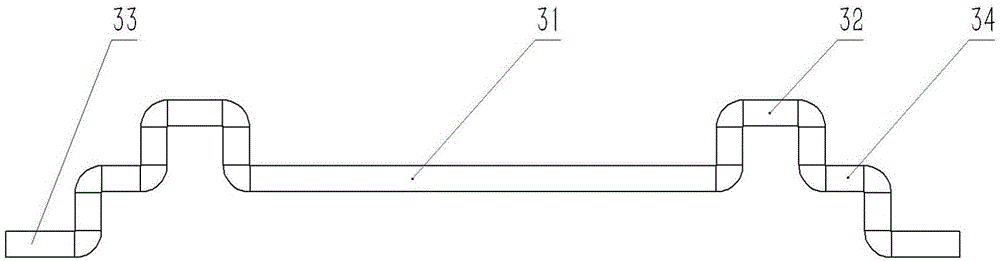
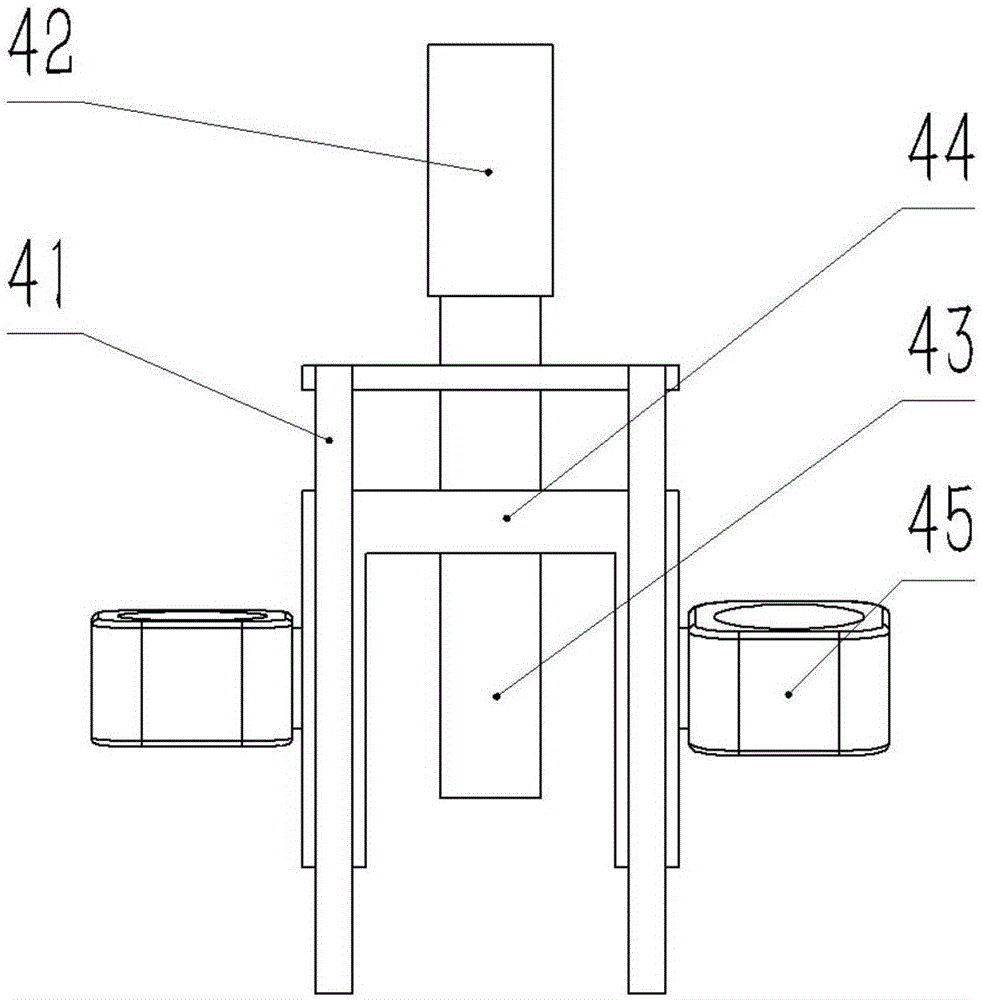
[0030] figure 1 is a schematic diagram of the structure of the present invention, Figure 5 It is an overall schematic diagram, as shown in the figure, the device of the present invention comprises a leg composed of two inner legs 9 and two outer legs 8, the inner legs 9 and the outer legs 8 are connected by a crankshaft 3, and the crankshaft 3 It includes a middle shaft 31, two supporting short shafts 34, two inner horizontal shafts 32 and two outer horizontal shafts 33; the inner leg 9 is rotatably arranged on the inner lateral shaft 32, and the two outer legs 8 They are respectively rotatably arranged on the outer horizontal shafts 33 at both ends; the inner and outer legs are provided with limit rings (2, 4) that can slide on them; the lifting hip joint 4 is fixed on the upper body platform The left side (right side) includes the slid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com