Gait rehabilitation training device
A rehabilitation training and gait technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of not being able to simulate the walking process of normal people well, the decline of the patient's rehabilitation experience, and restricting the movement of the patient's legs, so as to reduce the recovery time. The effect of training cost, low cost, and small footprint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
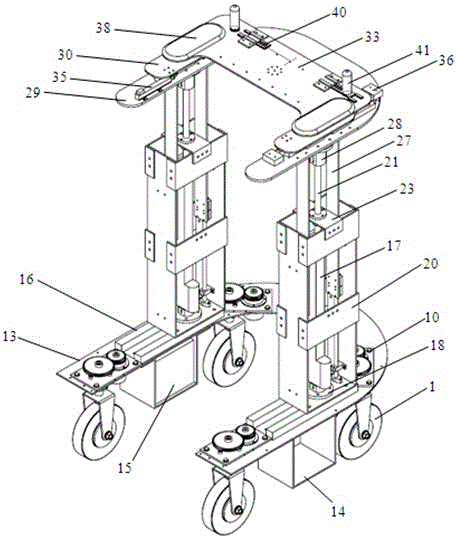
[0050] figure 1 The overall structure of the gait rehabilitation training system is shown, which is mainly composed of three parts: the wheel and chassis structure, the lifting structure and the armrest structure. The mechanical structure of these three parts will be described in detail below.
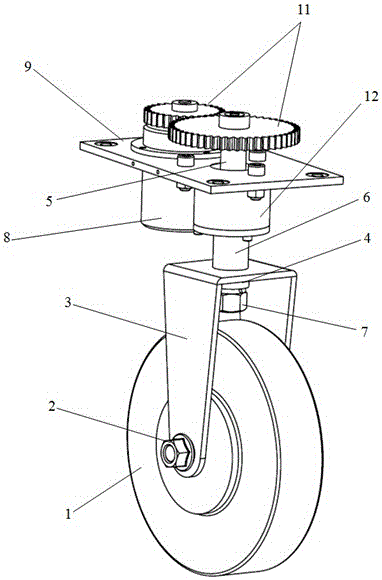
[0051] figure 2 This is the detailed structure of the wheel part of the gait rehabilitation training system. The wheels used in this gait rehabilitation system are hub motors 1, which are fixed on the fork suspension 3 through hexagonal flange nuts 2 and gaskets, and the fork suspension 3 is connected with the spline shaft 5 through the spline sleeve 4, and The degree of freedom in the vertical direction is fixed by the sleeve 6 and the nut 7, so that the fork suspension 3 has only one degree of freedom to rotate with the spline shaft 5. The steering gear 8 is fixed on the steering gear support plate 9 by bolts, and the steering gear support plate 9 is also connected with the U-sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com