Detection Method of Vehicles Driving in Front Lane Based on Interval Frame Difference Method
A detection method and lane line technology, applied in the field of detection algorithms for vehicles driving in the front lane line, can solve problems such as slowness, poor recognition effect, easy missed detection or false detection, etc., to achieve obvious displacement, enhanced detection effect, and better results accurate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
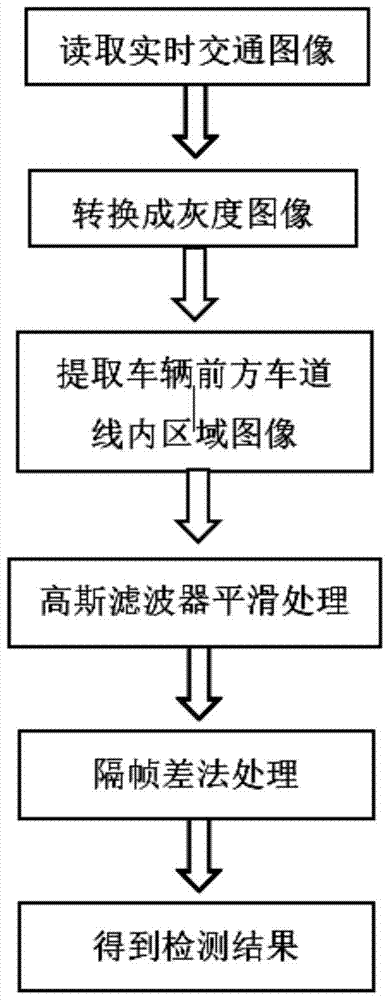
[0042] Refer to attached figure 1 , following the technical scheme of the present invention, the method of this embodiment is carried out according to the following steps:
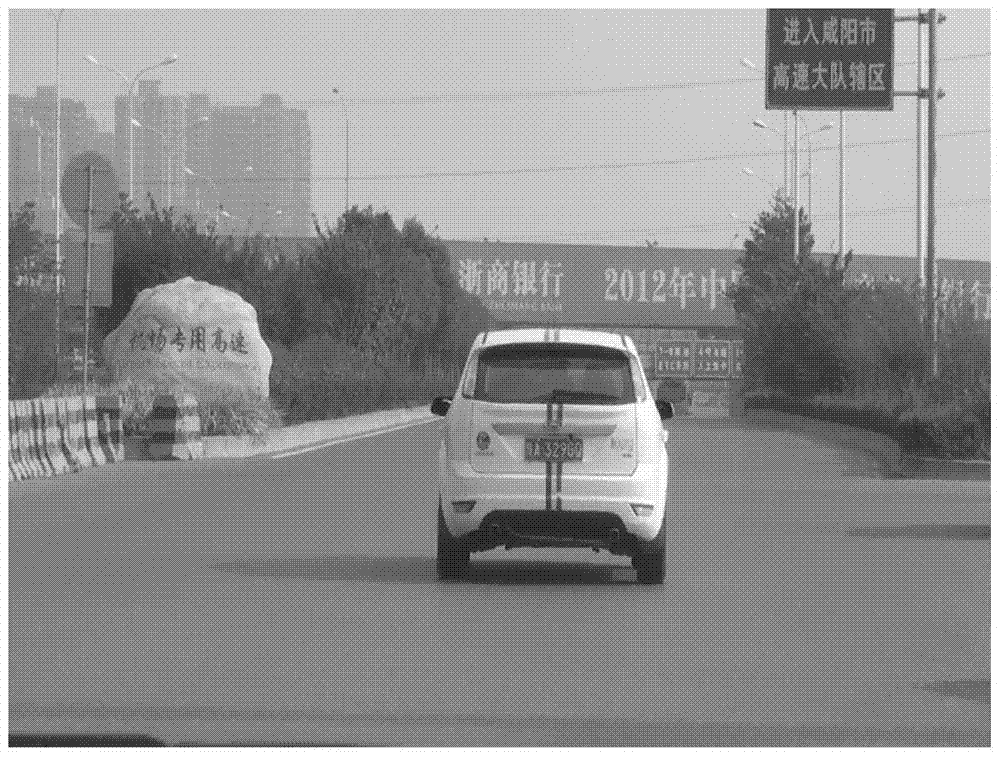
[0043] Step 1, read real-time traffic images, and obtain four consecutive color images, such as figure 2 As shown, it is one of the frame images;
[0044] Step 2, converting the extracted four frames of color images into grayscale images respectively;
[0045] Step 3, using Hough transform to detect the lane line of the grayscale image, and then using the projection method to extract the area image in the front lane line in the grayscale image;
[0046] Step 4, smoothing the image of the area within the lane ahead using a Gaussian filter to eliminate part of the noise;
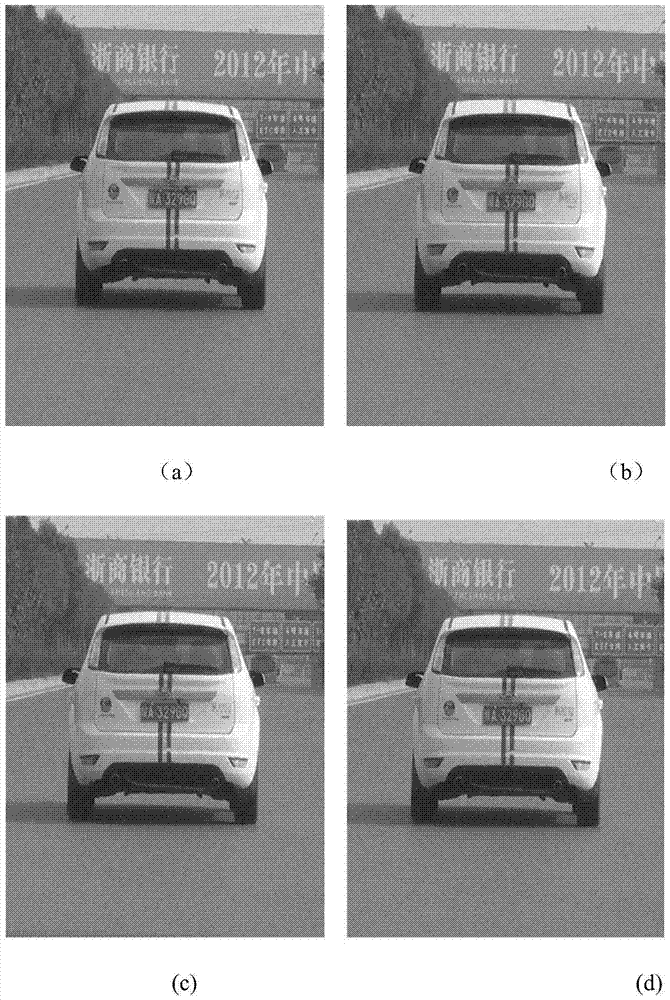
[0047] Step five, after the above four steps, a grayscale image with less noise is obtained, such as image 3 (a) ~ (d), and then use the improved frame difference method for processing. The specific method is as follows:
[0048] 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com