EtherCAT bus-based eight-shaft robot control system
A control system and robot technology, applied in the direction of digital control, electrical program control, etc., can solve problems such as unfavorable compatibility and integration of existing systems, failure to meet 8-axis robot control, and affect system performance, so as to improve data transmission speed and real-time Enhanced performance, improved accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
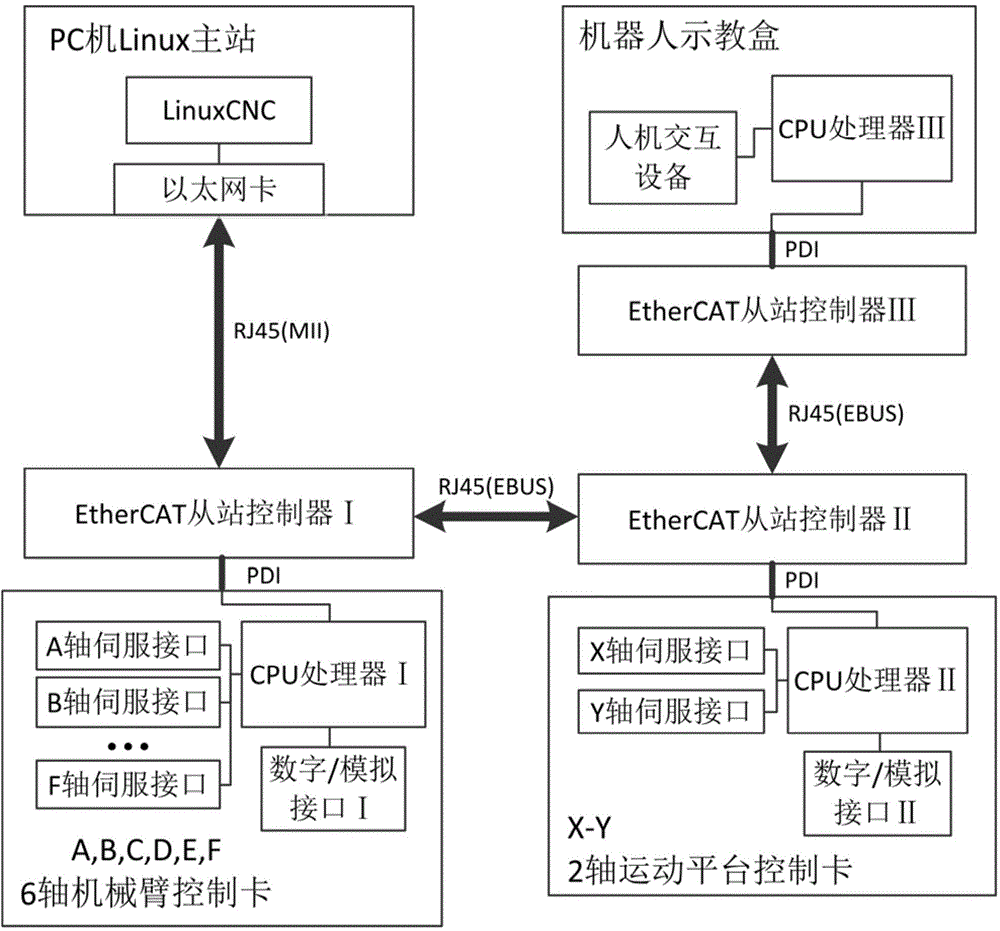
[0028] Such as figure 1 As shown, an 8-axis robot control system based on the EtherCAT bus includes a PC Linux master station, a 6-axis manipulator control card, a 2-axis motion platform control card, and a robot teaching box. Each part is controlled by its corresponding EtherCAT slave station. The controller is connected to the PC Linux master station, and communicates through the EtherCAT bus protocol on the physical link of the RJ45 network cable. The interface between the EtherCAT slave station controller Ⅰ and the Ethernet card is MII, and the EtherCAT slave station controller Ⅰ and the EtherCAT slave station The interface mode used by controller II and EtherCAT slave controller II and EtherCAT slave controller III is EBUS, and both interface modes are established o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com