Telescopic type hyper-redundance series-parallel connection variable stiffness swinging and propelling device
A propulsion device and variable stiffness technology, which is applied to non-rotating propulsion elements and other directions, can solve the problems affecting the smoothness of bionic flexible fish swimming and complicated control, and achieve the effect of large thrust, simplified control method and improved propulsion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
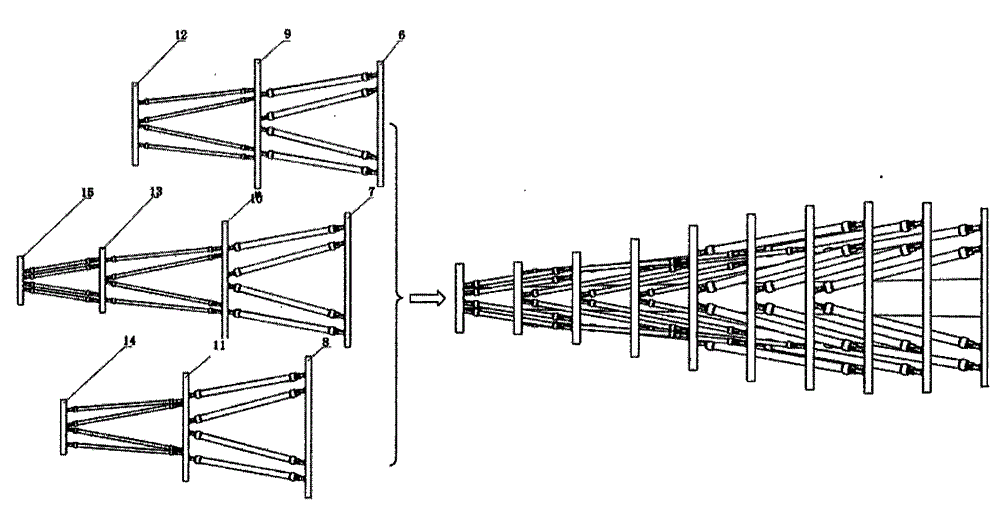
[0023] like Figure 1-Figure 3 As shown, a telescopic ultra-redundant series-parallel variable stiffness swing propulsion device includes a head 1, a redundant drive parallel mechanism and a tail fin 2, and the redundant drive parallel mechanism includes a leaf spring backbone 3 and legs 4 , flexible hinge 5, first-level parallel mechanism lower platform 6, second-level parallel mechanism lower platform 7, third-level parallel mechanism lower platform 8, first-level parallel mechanism upper platform 9, second-level parallel mechanism upper platform 10, The upper platform 11 of the third-level parallel mechanism, the upper platform 12 of the fourth-level parallel mechanism, the upper platform 13 of the fifth-level parallel mechanism, the upper platform 14 of the sixth-level parallel mechanism, the upper platform 15 of the seventh-level parallel mechanism; the leaf spring spine 3 One end is fixedly connected to the head 1, and the other end is fixedly connected to the tail fin 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com