An arm inertial motion capture data fusion method
A technology of motion capture and data fusion, applied in the direction of electrical digital data processing, special data processing applications, instruments, etc., can solve the problems of large amount of calculation, complex operation, low amount of calculation, etc., and achieve the reduction of algorithm complexity and calculation amount Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
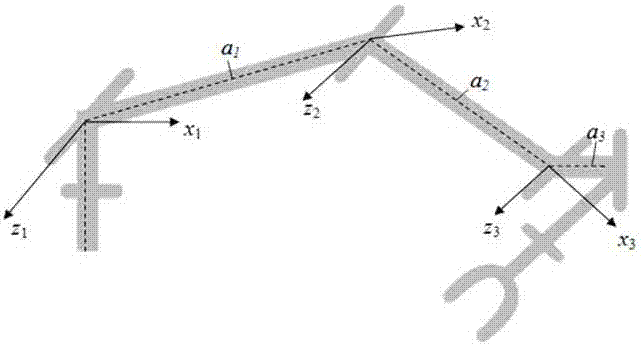
[0013] As shown in Table 1, the present invention has established a kind of arm quaternion model for motion capture, and this model is based on D-H model, regards the physical model of human arm as being made up of three rigid bodies of upper arm, forearm and palm , the establishment method of the relative coordinate system of each rigid body relative to the reference system is the same as that of the D-H model; the difference is that the quaternion model uses spherical coordinates to establish the coordinate system, and the quaternion is used to represent the attitude of each rigid body.
[0014]
[0015] Table 1 is the relationship between the arm quaternion model and the D-H model of the present invention
[0016] Such as figure 1 As shown, the coordinate system is established using spherical coordinates, where a 1 and a 2 are the upper arm and forearm lengths, respectively.
[0017] As shown in Table 2, the angle between the arm joints is expressed in the form of Eul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com