


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A method for unobstructed positioning of surgical instruments based on two binocular vision systems
A binocular vision system and surgical instrument technology, which is applied in the field of unobstructed positioning of surgical instruments, can solve the requirements of reducing the motion accuracy of the robotic arm, reduce the cost of the robotic arm, and easily block the markers, etc., and meet the requirements of reducing the motion accuracy , reduce costs, and avoid the effect of coordinate transformation operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
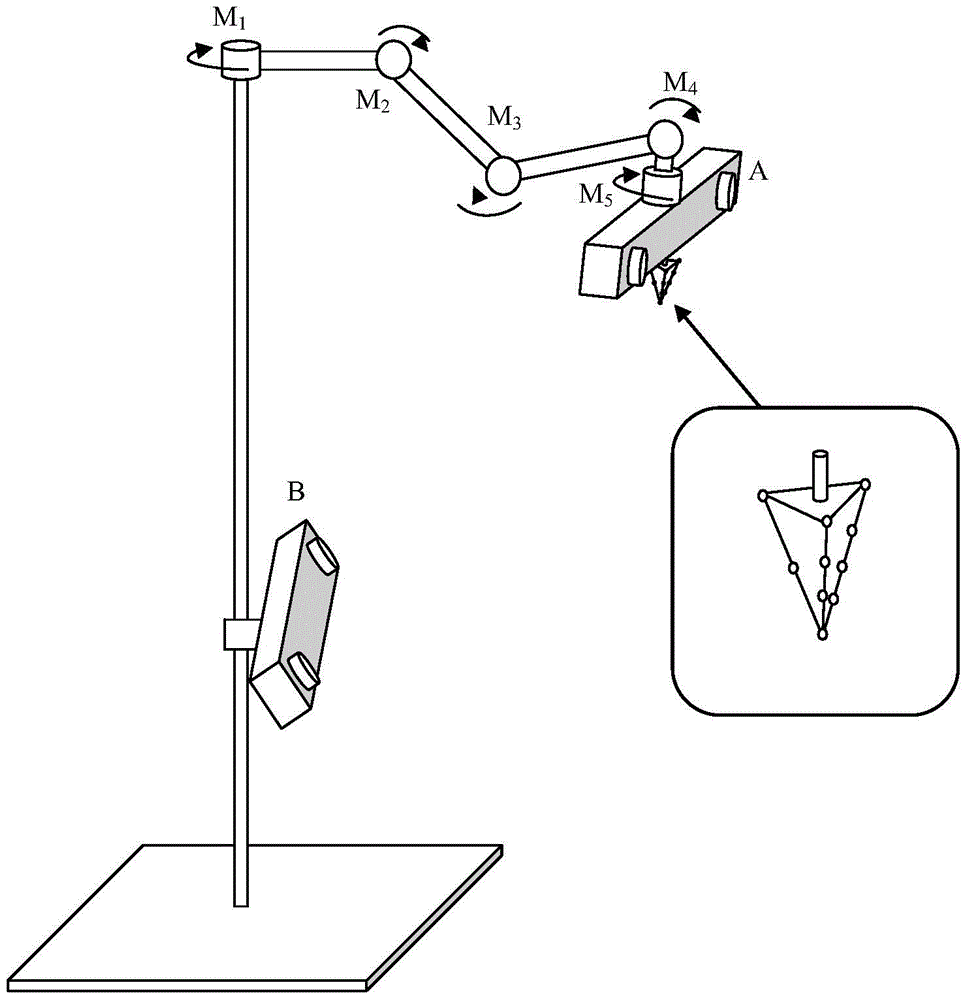
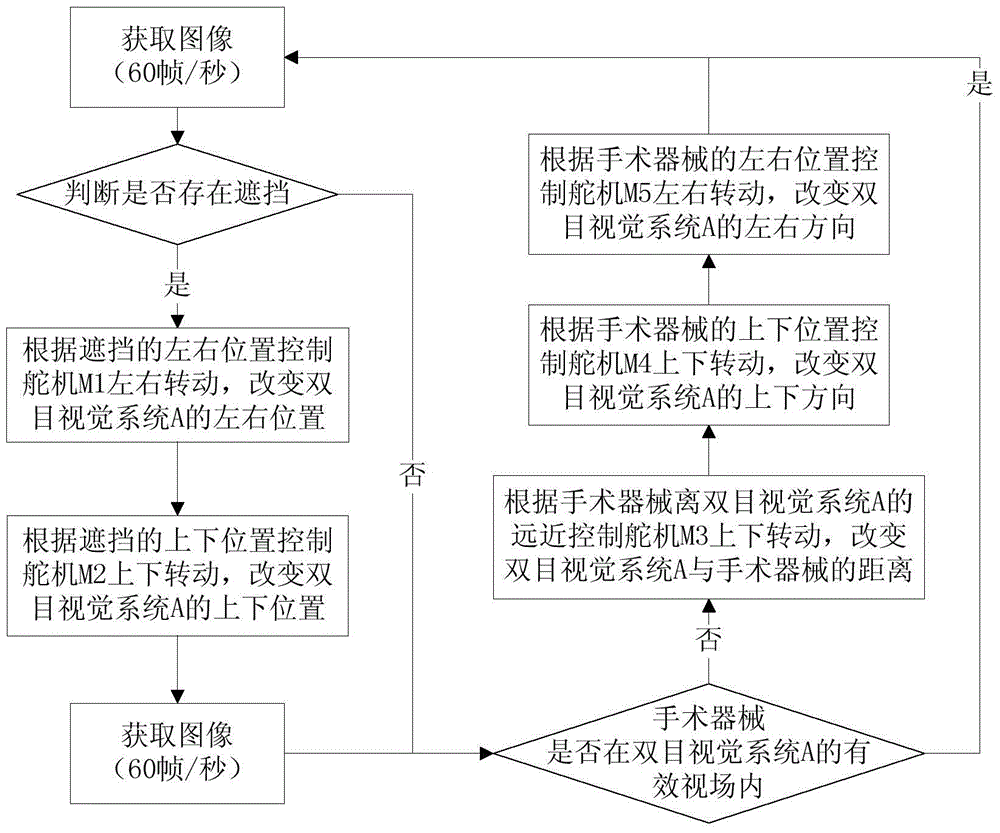
[0025] Such as figure 1 As shown, an unobstructed positioning method for surgical instruments based on two binocular vision systems is realized through the following steps:
[0026] (1) Fix the binocular vision system A (hereinafter referred to as A) to the front end of the robot arm and move with the robot arm. The binocular vision system consists of two near-infrared cameras and brackets that fix their positions. Initialize the position of the robotic arm so that the optical axis of the two cameras of A is level with the ground. The center of the connection between the two cameras is on the rotating shaft of the robotic arm servo M5. Such as figure 1 shown. Take the center of the line connecting the two cameras of A as the origin, take the direction of the line connecting the two cameras as the X-axis, take the direction from the left camera to the right camera as the X-axis direction, and take the vertical upward as the Z-axis to establish a Cartesian coordinate system as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com