Method for solving optimal batting configuration for flight ball body operation of humanoid manipulator
A technology of mechanical arm and operation model, which is applied in the field of robotics and can solve problems such as increasing the number of calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0089] Implementation example: effect of the present invention can be further illustrated by following experimental simulation:
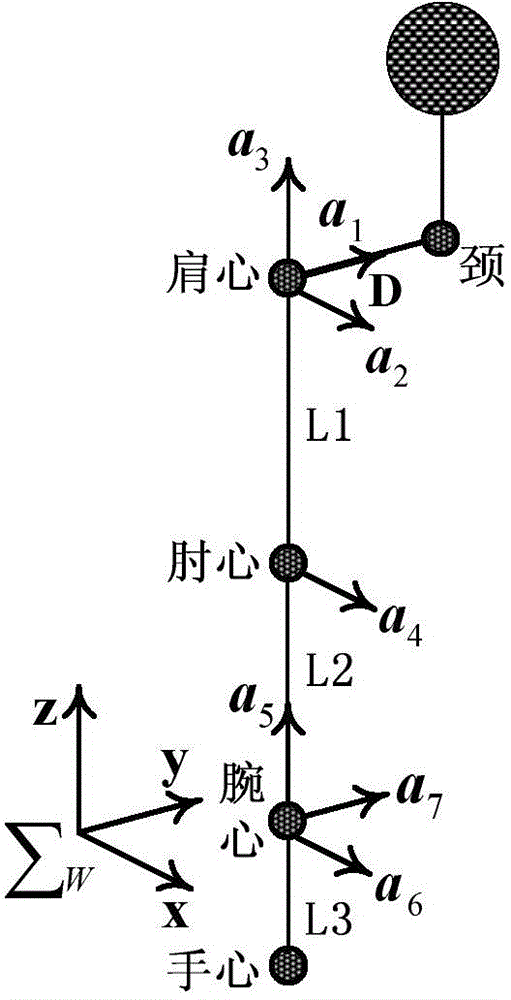
[0090] consider as figure 2 The joint structure model of the designed seven-degree-of-freedom humanoid manipulator is shown. Table 1 below shows the angle range of each joint of the manipulator.
[0091] Table 1 Angle range of each joint of the 7-DOF redundant dexterous arm (degrees)
[0092]
[0093] Suppose the shoulder width of the robotic arm is D=0.14m, and the length from the shoulder to the elbow of the upper arm is L 1 =0.26m, distance L from elbow to wrist of lower arm 2 = 0.25m, the distance L from the wrist to the center of the racket 3 =0.14m; set the shoulder as the origin of the world coordinate system, and the pose of the neck of the humanoid robot arm is p 0 =(0.00 0.14 0.00) T m, R 0 = E (unit array); if the position of the heart of the racket and the Cartesian speed of the racket required by the humanoid robotic arm for the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com