Fish streaming based non-signal intersection vehicle-vehicle cooperation control system
A fish swarm effect and collaborative control technology, applied in road vehicle traffic control systems, traffic control systems, collision avoidance systems, etc., can solve problems such as inability to detect vehicles, expand the perception range, improve utilization, ease traffic congestion and Effects of clogging problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
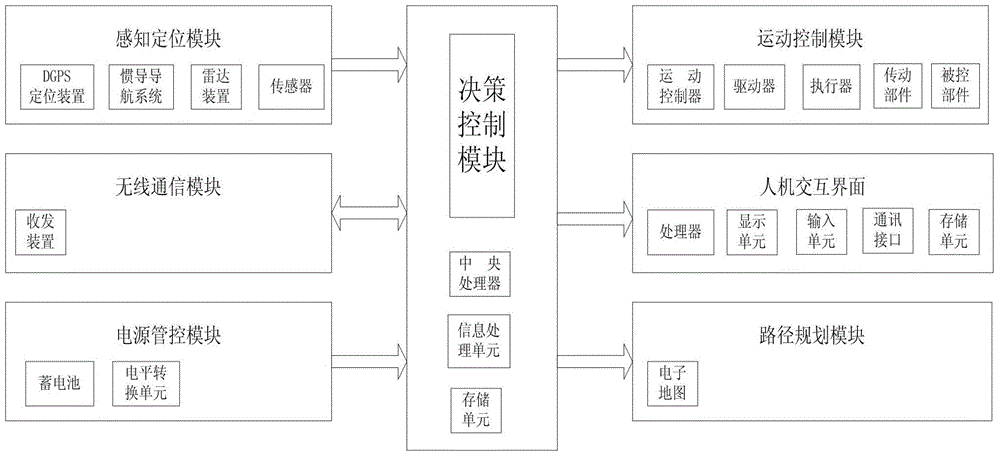
[0049] The unsignalized intersection vehicle-vehicle cooperative control system based on the fish swarm effect as shown in the figure is characterized in that it includes a perception positioning module, a motion control module, a wireless communication module, a human-computer interaction interface, a power control module, a path planning module and decision control module;
[0050] The perceptual positioning module includes two parts of environment perception and navigation positioning, specifically including DGPS positioning device, inertial navigation system, radar device and sensor, all information obtained by the perceptual positioning module is sent to the information processing unit in the decision-making control module; The DGPS positioning device described above is fixed inside the console to obtain the geographic location information of the vehicle; the inertial navigation system includes a gyroscope and an accelerometer, etc., and the inertial navigation system is f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com