Flight control system and method for ship-borne unmanned aerial vehicle autonomous landing
A flight control system and unmanned aerial vehicle technology, applied in the field of flight control, can solve problems such as altitude, airspeed and aircraft pitching attitude without comprehensive consideration, and achieve good results, ensure safety, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
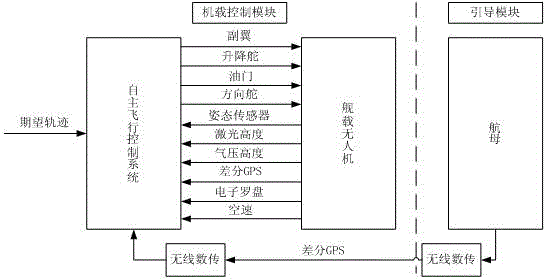
[0045] Such as figure 1 As shown, the present invention discloses a flight control system for autonomous landing of a ship-borne UAV, including an on-board control module and a guidance module, wherein:
[0046] The guidance module is set on the ship and includes a differential GPS base station and shipboard wireless data transmission;
[0047] The differential GPS base station is used to send carrier phase information and base station coordinate information to the differential GPS mobile station;
[0048] The airborne control module is arranged on the unmanned aerial vehicle and includes a laser height sensor, a differential GPS mobile station, an autopilot, and airborne wireless data transmission;
[0049] The differential GPS mobile station is used to receive the carrier phase of the GPS satellite and the information from the differential GPS ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com