


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Visual robot for abdominal cavity minimally-invasive surgery
A minimally invasive surgery and robotic technology, applied in the field of visual robotics, can solve the problems of the influence of the doctor's mood and fatigue, the high price of the robotic system, poor surgical accuracy and quality, etc., to achieve the effect of beautifying scars, increasing flexibility and freedom, less traumatic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
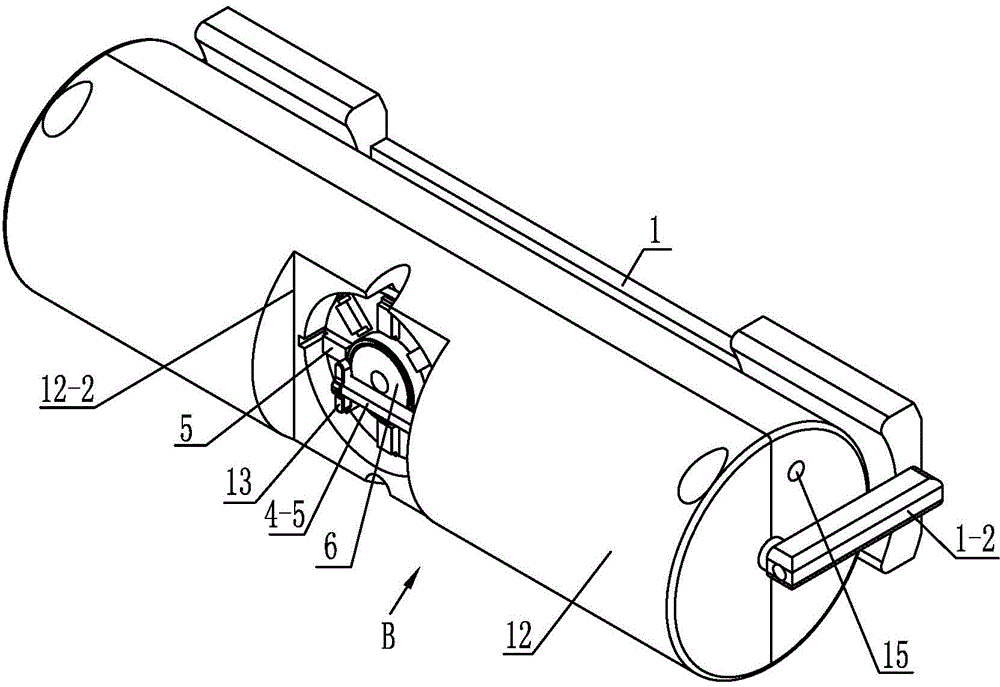
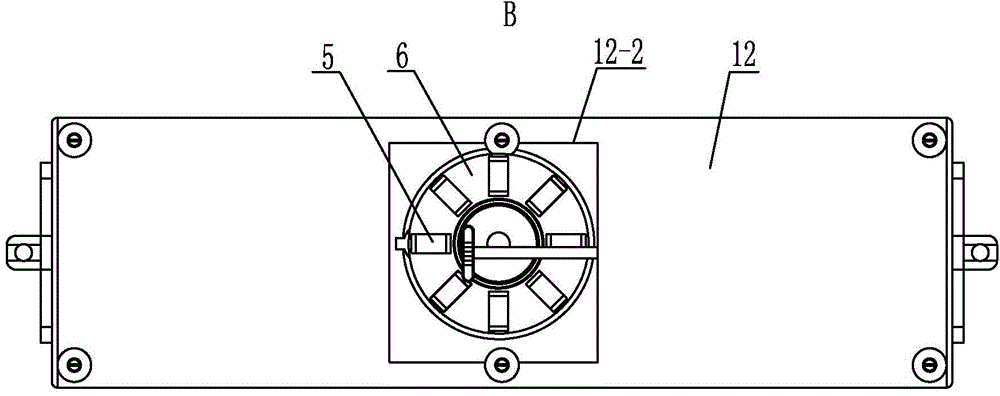
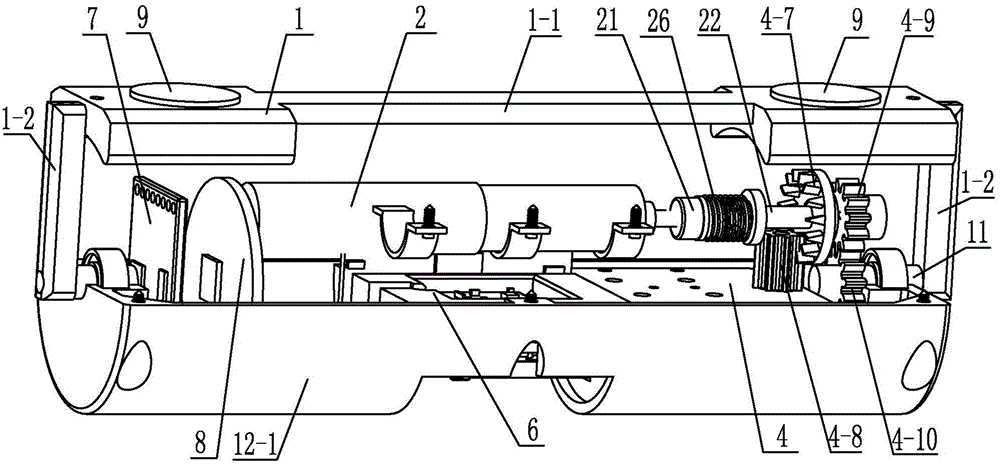
[0015] Specific implementation mode 1: Combination Figure 1-Figure 9 It is explained that the vision robot for minimally invasive abdominal surgery in this embodiment includes a housing 12 and a cleaning base 13; it also includes a three-segment shaft structure, a suspension bracket 1, a motor 2, a crank slider mechanism 4, a camera module 6, and wireless Transceiver module 7, central control circuit module 8, two permanent magnets 9, two fixed shafts 11 and multiple LED lights 5;
[0016] The three-segment shaft structure includes a first transmission shaft 21, a second transmission shaft 22, a third transmission shaft 20, a spring 26 and a square key 27. One end of the first transmission shaft 22 and one end of the second transmission shaft 21 are inserted into the two The square key 27 on the second transmission shaft 22 is connected with one end of the first transmission shaft 22 and one end of the second transmission shaft 21 is fitted with a spring 26 resting on the two. T...
specific Embodiment approach 2
[0024] Specific implementation manner two: combination Figure 8 Note that the sliding groove 4-11 of this embodiment is a dovetail groove or an inverted convex groove. This arrangement facilitates smooth sliding of the slider in the sliding groove, and can well wipe tissue fluid and water vapor on the lens by the cleaning substrate. Others are the same as the first embodiment.
specific Embodiment approach 3
[0025] Specific implementation mode three: combination image 3 , Figure 4 with Image 6 Note that the first cylindrical gear 4-9 and the second cylindrical gear 4-10 in this embodiment are both straight cylindrical gears. Easy to use and reliable, stable operation. Others are the same as the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com