Image processing method in underwater visual slam system
An image processing and vision technology, applied in image data processing, image analysis, instruments, etc., can solve problems such as difficult real-time performance, time-consuming, affecting real-time performance of algorithms, etc., to achieve rapid and accurate extraction, overcome poor real-time performance, and overcome features The effect of point redundancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
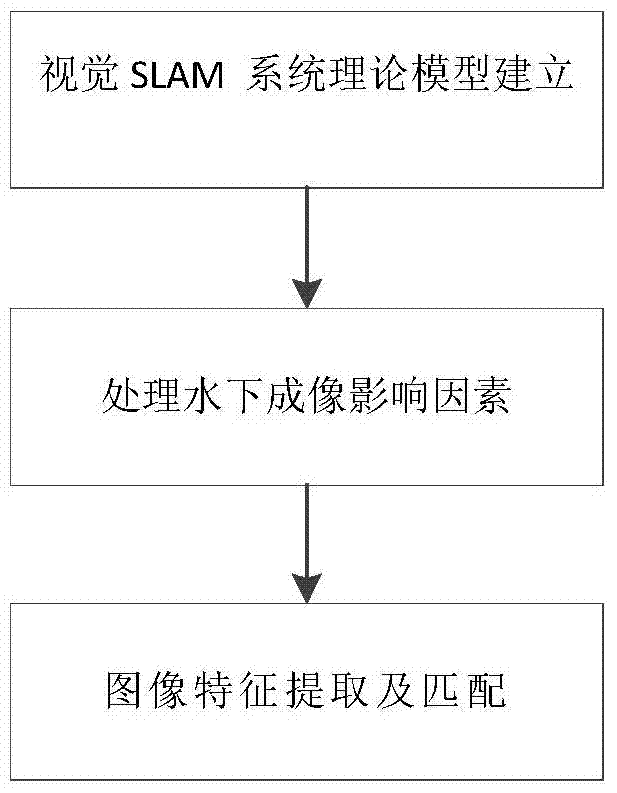
[0043] like figure 1 As shown, an image processing method in an underwater vision SLAM system includes the following steps:
[0044] Step 1: Build a visual SLAM system model
[0045] Step 1.1: Build the carrier motion model
[0046] The carrier motion model is to model the motion of the robot under the condition of effective external force and noise. Its main function is to calculate the state of the robot at the next moment according to the motion state of the carrier at the previous moment.
[0047] x v (k+1)=F v [x v (k),u v (k+1),k+1]+V v (k+1)
[0048] In the formula, x v (k) is the carrier state vector at time k, the equation Fv[ ] is the carrier dynamics equation, u v (k+1) is the effective inner and outer input at time k+1, V v Indicates some uncertain factors.
[0049] For these unpredictable factors, the measure we take is to introduce a random variable to simulate these uncertain factors, with V v means that it satisfies the following conditions:
[005...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com