A Space Manipulator Trajectory Planning Method for Minimizing Base Collision Disturbance
A space manipulator and trajectory planning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of increasing the quality of the space manipulator system, not taking into account the limitation of the joint angle of the manipulator, and limited optimization capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
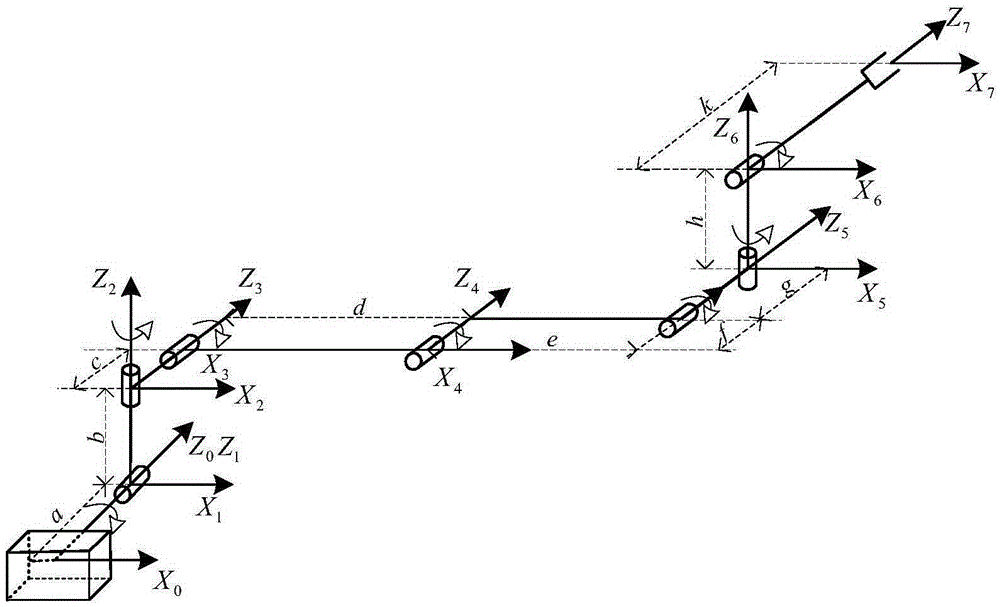
[0090] According to the space manipulator trajectory planning method that minimizes the collision disturbance of the base provided by the present invention, as figure 1 The shown seven-degree-of-freedom space manipulator is the research object for verification. The D-H parameters and dynamic parameters of the manipulator are shown in Table 1 and Table 2.
[0091] Table 1 Space manipulator D-H parameter table
[0092]
[0093] Table 2 Dynamic parameters of space manipulator
[0094]
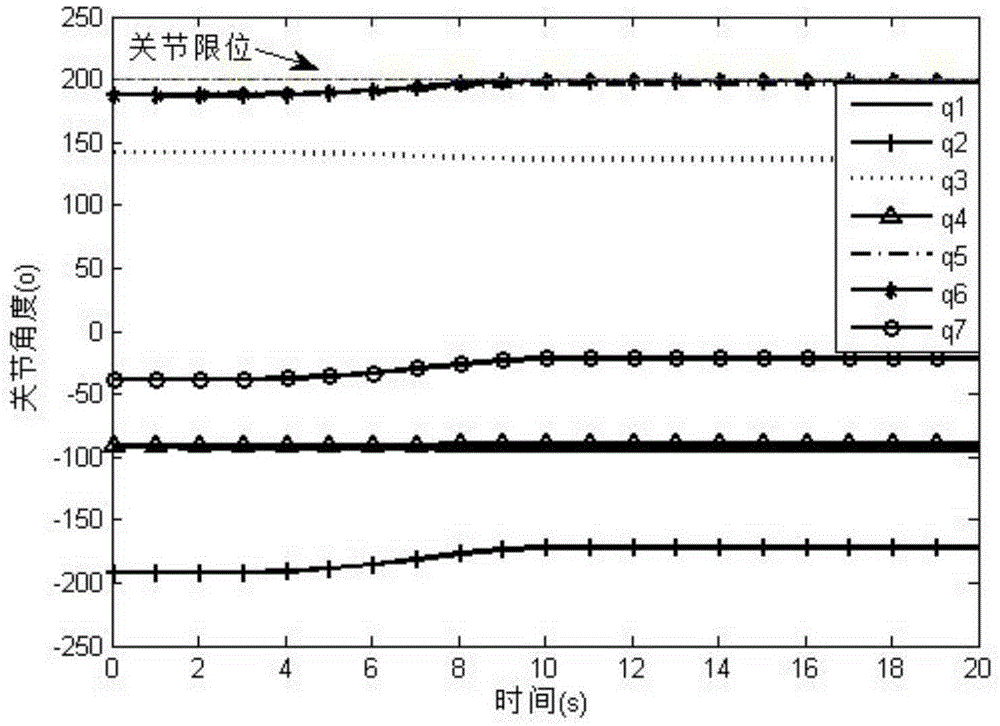
[0095] Use the method described in the manual to derive the attitude disturbance equation of the base, and use the designed comprehensive optimization factor to optimize its configuration in the zero space of the space manipulator, and finally use the particle swarm optimization method to plan the position from the initial position to the ideal Touch the front track. Set the relevant parameters as follows:
[0096] Ideal end pose: [7.00m, 0.00m, 3.00m, -1.00rad, -0.50rad, -2.00rad];
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com