Robot front-end arm based on rear-mounted wrist point motor
A robot and wrist point technology, applied in the field of intelligent robots, can solve the problems of complicated controller design, unavailability of application, increased overshoot, etc., to achieve the effect of light weight, improved flexibility, and small movement space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings.
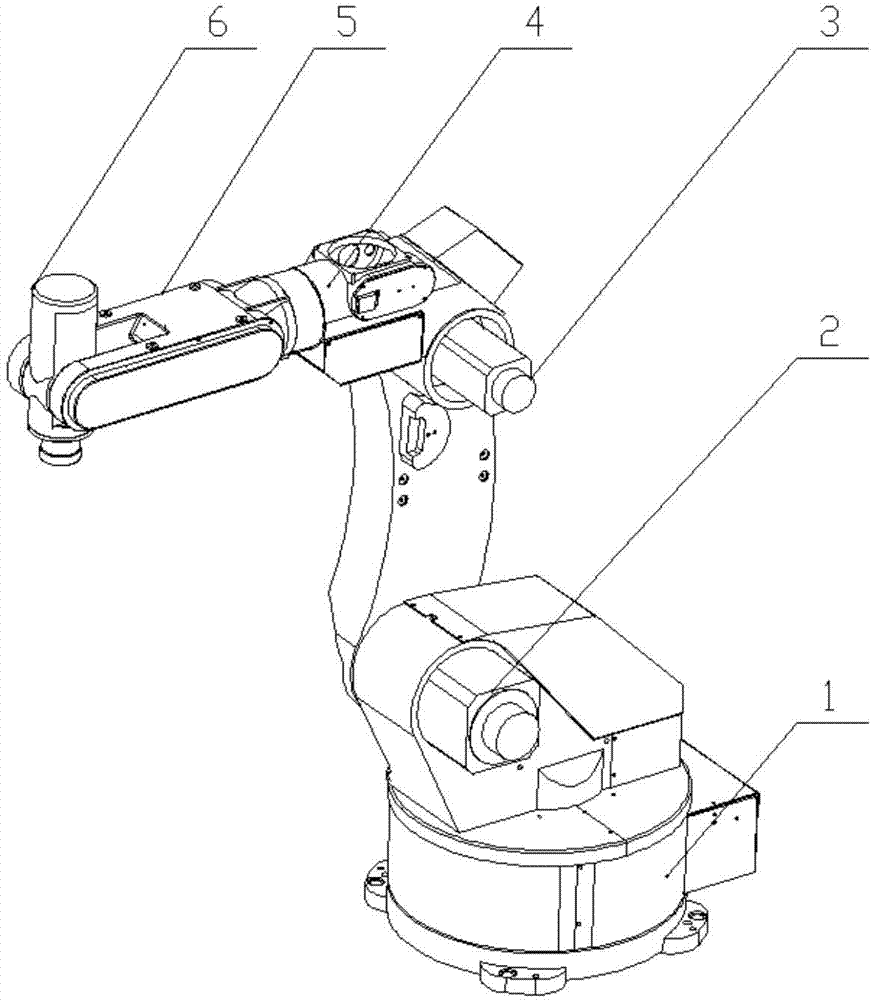
[0016] like figure 1 As shown, a kind of robot front-end arm 10 based on the rear of the wrist point motor, the wrist point of the front-end arm 10 (wrist point: the robot arm joint is driven by a motor and a reducer, and the two robot joints rotate around this point. .) The robot end effector 11 is set at the front. The front end arm includes a speed reducer 8 and a motor 7 . The reducer 8 and the motor 7 are coaxially arranged, and the axis passes the wrist point of the front end arm; the reducer 8 is arranged behind the wrist point, the motor 7 is arranged after the reducer 8, and the motor 7 and the reducer 8 are connected by the motor shaft. The distance between the wrist point and the front end of the reducer 8 is 23.5 mm. The distance between the rear end face of the reducer 8 and the front end face of the motor 7 is 25mm. The distance between the front end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com