Master-slave synchronous serial communication bus based on differential signal and its realization method
A technology of synchronous serial and communication bus, which is applied in the field of master-slave synchronous serial communication bus, which can solve the problems of inability to guarantee real-time transmission of large quantities of data and low transmission rate of master-slave synchronous serial communication, so as to improve distance and anti-interference ability, the effect of eliminating delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
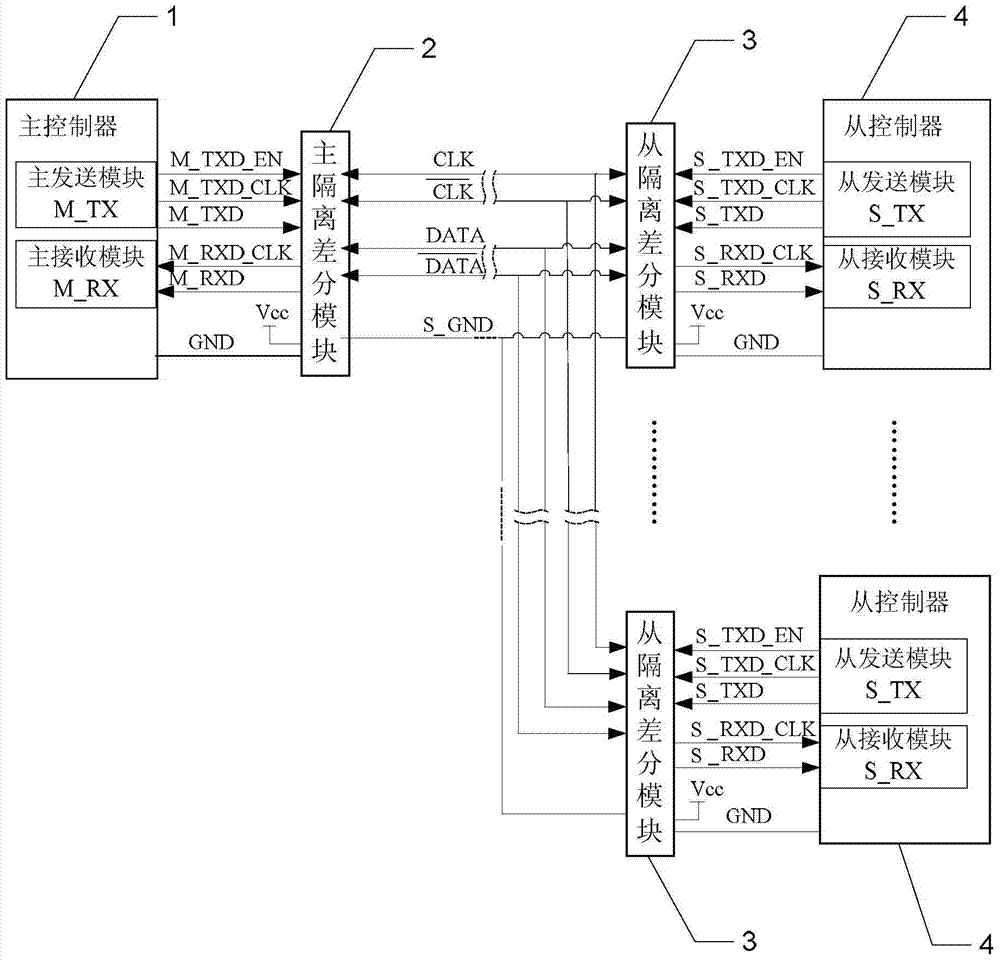
[0026] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the master-slave synchronous serial communication device based on differential signals in this embodiment, the communication device includes a master controller 1, a master isolation differential module 2, n slave isolation differential modules 3 and n slave controllers 4, n is a positive integer, the master controller 1 includes a master sending module M_TX and a master receiving module M_RX, and each slave controller 4 includes a slave sending module S_TX and a slave receiving module S_RX;
[0027] The main transmitting module M_TX and the main isolated differential module 2 are connected through the enable signal line M_TXD_EN, the clock signal line M_TXD_CLK and the data signal line M_TXD, and the main receiving module M_RX and the main isolated differential module 2 are connected through the clock signal line M_RXD_CLK and the data signal line M_RXD connection, the master...
specific Embodiment approach 2
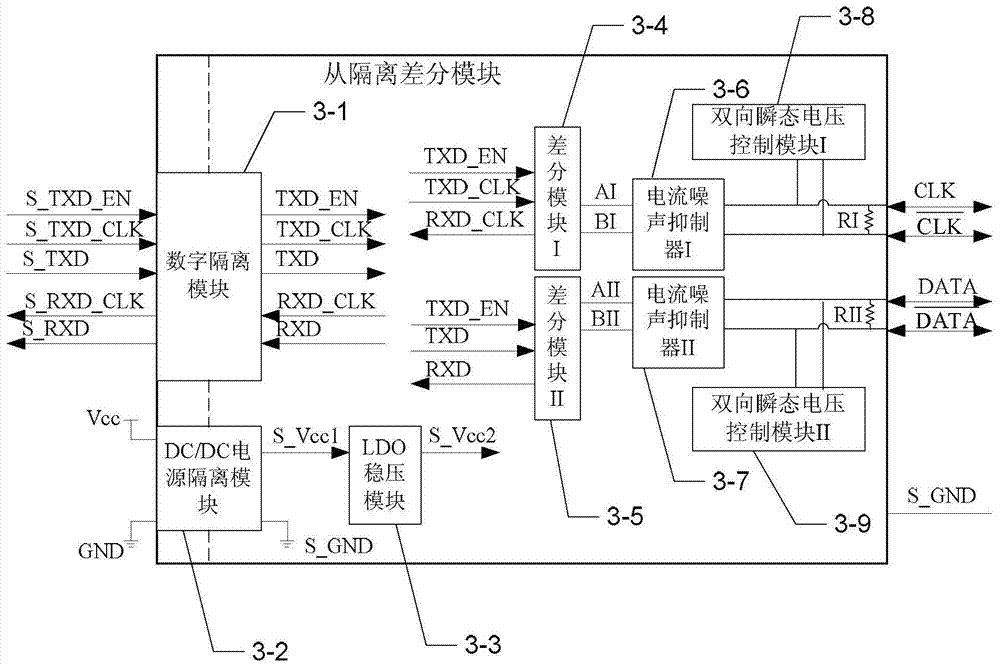
[0028] Specific implementation mode two: the following combination figure 2 This embodiment is described. This embodiment will further explain Embodiment 1. The n slave isolation differential modules 3 have the same structure, and all include a digital isolation module 3-1, a DC / DC power isolation module 3-2, and an LDO voltage regulator module. 3-3. Differential module I3-4, differential module II3-5, current noise suppressor I3-6, current noise suppressor II3-7, bidirectional transient voltage control module I3-8, bidirectional transient voltage control module II3- 9. Two impedance matching resistors RI and RII;
[0029] The digital isolation module 3-1 and the slave transmitting module S_TX of the slave controller 4 are connected through the enable signal line S_TXD_EN, the clock signal line S_TXD_CLK and the data signal line S_TXD, and the digital isolation module 3-1 and the slave receiving module of the slave controller 4 S_RX is connected to the data signal line S_RXD...
specific Embodiment approach 3
[0035] Specific implementation mode three: the following combination Figure 3-Figure 6 Describe this embodiment, the implementation method of the master-slave synchronous serial communication device based on differential signals described in this embodiment, the specific process of this implementation method is:
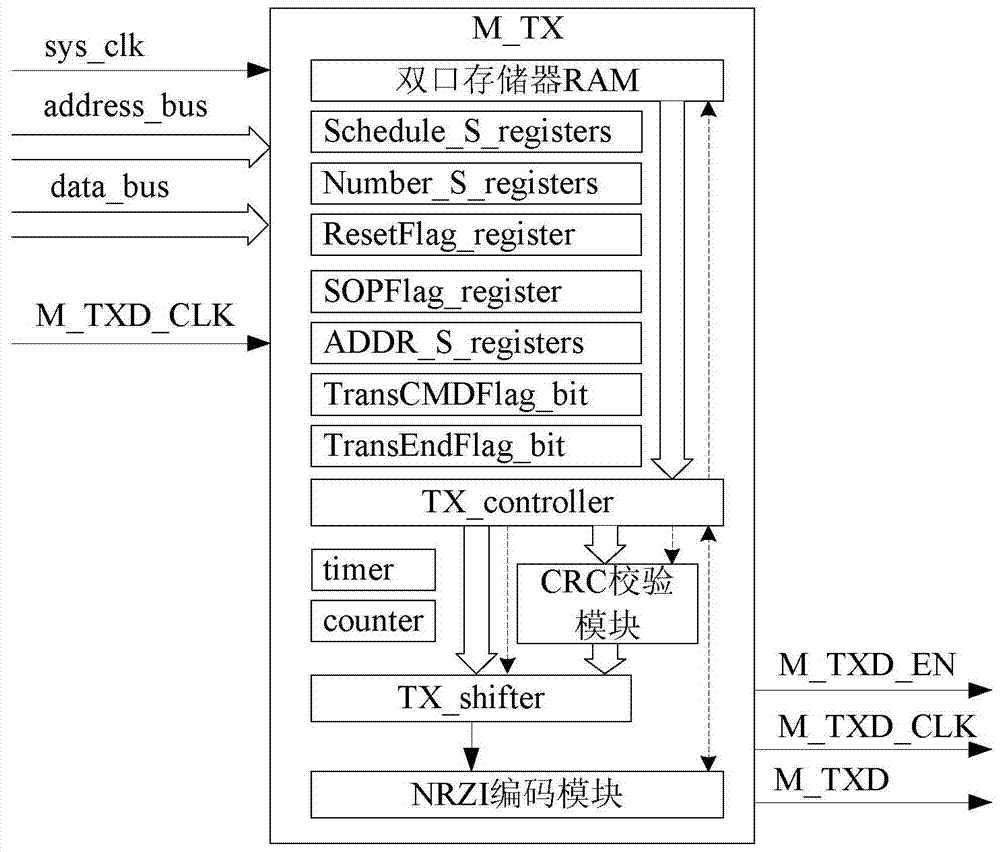
[0036] The main controller 1 periodically reads the valid data in the dual-port memory RAM of the main receiving module M_RX, then inverts the sending end flag and assigns it to the sending start flag, and starts the main sending module M_TX;
[0037] The main controller 1 configures the time register group, the quantity register group, the reset identification register, the data packet start identification register, the address register group and the sending start identification bit in the main transmission module M_TX through the address bus and the data bus according to the system clock, and will The data packet to be sent is written into the dual-port memory RAM...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com