Crawler type six-freedom-degree mobile robot
A technology of mobile robots and degrees of freedom, applied in tracked vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of insufficient compact ground area, unfavorable protection of important components, limited obstacle height, etc., to achieve enhanced ground adaptability, Conducive to the effect of protecting and saving design space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
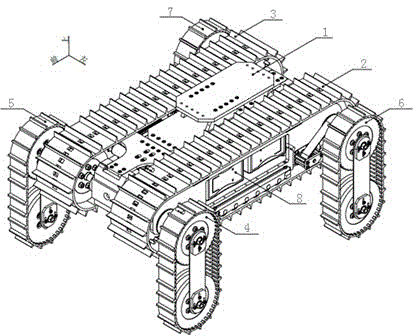
[0043] see Figure 1 to Figure 10 , the crawler-type six-degree-of-freedom mobile robot includes two main motion modules 2 and 3 on the left and right sides, four swing arm motion modules 4, 5, 6, and 7 on the left front, right front, left rear, and right rear, and a frame 1. Box 8 and four angle sensors 9a, 9b, 9c, 9d. It is characterized in that: the frame 1 is the body of the robot, which is used to carry and connect various modules and bear external loads; the two main motion modules 2 and 3 on the left and right sides are symmetrically distributed with the frame 1 as the center, and can independently drive; the four swing arm motion modules 4, 5, 6, and 7 in the front left, front right, rear left, and rear right have the same structure, and are symmetrically distributed front, rear, left, and right to the frame 1, and each has an independent drive unit; The control box 8 is located inside the frame 1 and is protected by the frame 1 and its own box body; the four angle se...
Embodiment 2
[0045] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
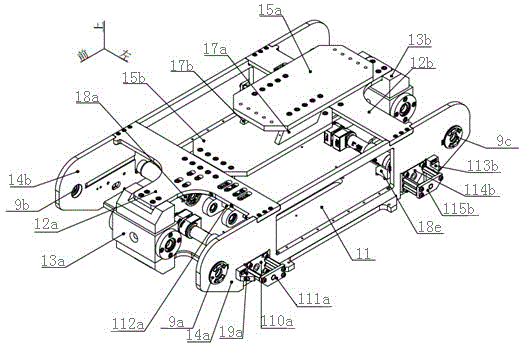
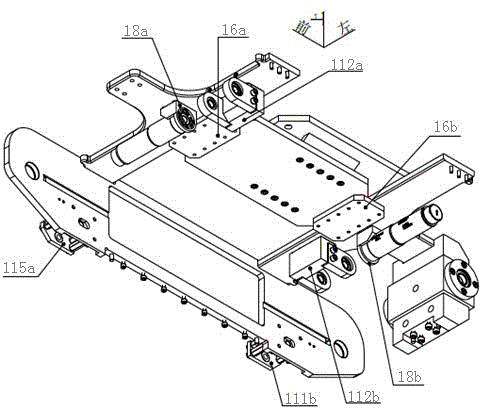
[0046] Described frame 1 comprises web 11, front neck plate 12a, back neck plate 12b, front head 13a, rear head 13b, left rib 14a, right rib 14b, upper ridge 15a, lower ridge 15b, front ridge is fixed Block 16a, rear ridge plate fixing block 16b, left support block 17a, right support block 17b, front upper motor fixing block 18a, rear upper motor fixing block 18b, left front motor fixing block 18c, right front motor fixing block 18d, left rear motor fixing Block 18e, right rear motor fixing block 18f, front positive tension column 19a, rear positive tension column 19b, front positive swing arm synchronous pulley inner support 110a, rear positive swing arm synchronous pulley inner support 110b, front positive swing arm Synchronous pulley outer support 111a, rear positive swing arm synchronous pulley outer support 111b, front main synchronous pulley support 112a, rear main sy...
Embodiment 3
[0052] The crawler-type six-degree-of-freedom mobile robot includes a frame 1, main motion modules 2 and 3, swing arm motion modules 4, 5, 6 and 7, a control box 8, and sensors. Among them, the frame 1 is composed of parts 11 to 115b, and each part is specifically named as shown in the table according to the different installation positions; the main motion module includes the left main motion module 2 and the right main motion module 3, each separately The main motion module is composed of parts 21a to 213, and each part is specifically named as shown in the table according to the installation position; the swing arm motion module includes the left front swing arm motion module 4, the right front swing arm motion module 5, the left rear Swing arm movement module 6 and right rear swing arm movement module 7, each individual swing arm movement module is composed of parts No. 41 to 414, and each part is specifically named as shown in the table according to the installation positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com