Four-wheeled independently-driven electric automobile stability control method and system
A technology for stability control and electric vehicles, applied in automatic steering control components, motor vehicles, control devices, etc., to solve problems such as reducing vehicle performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
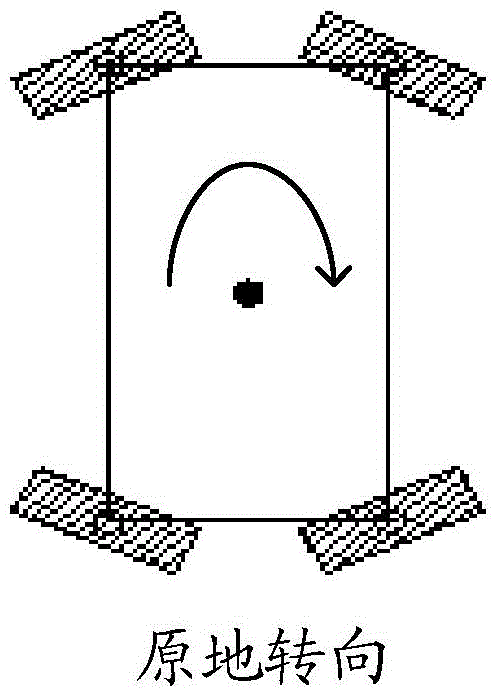
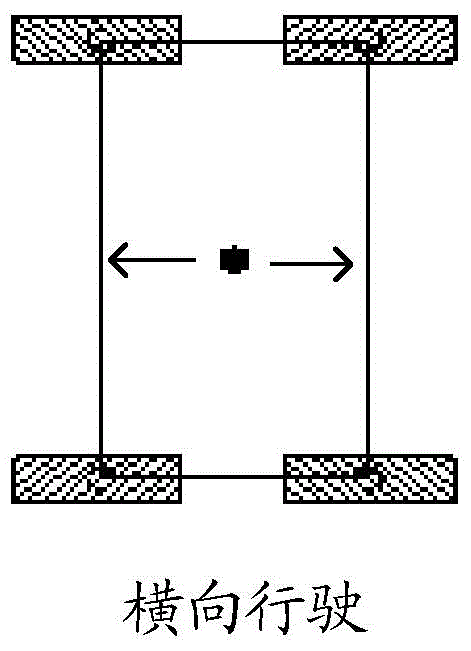
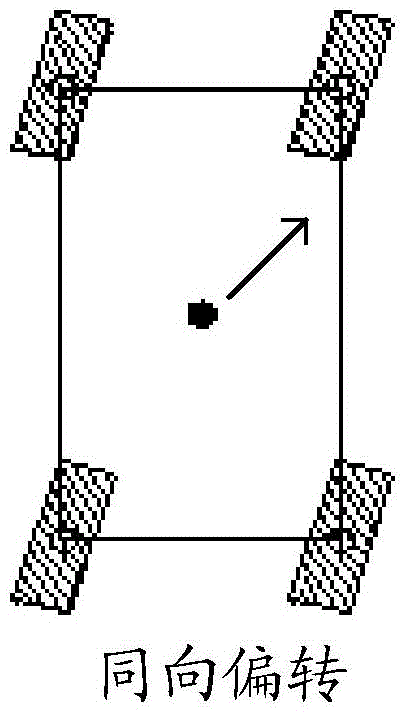
[0060] An embodiment of the present invention provides a stability control method for a four-wheel independent drive electric vehicle; wherein, the four-wheel independent drive electric vehicle is provided with four independent power drive motors and four independent steering drive motors, that is, each wheel is There are two driving motors, one is used as power drive, and the other is used as steering drive. This wheel drive design makes the angle of rotation of the car larger, and each wheel can perform 180-degree steering (including forward and Reverse 90 degrees each), and can even move laterally, as shown in Figure 1; specifically, Figure 1A Indicates that the car turns in place, Figure 1B Indicates that the vehicle is traveling laterally, Figure 1C Indicates that the vehicle deflects in the same direction (if the original driving direction is right, the steering direction is still right), Figure 1D Indicates that the vehicle deflects in different directions (such a...
Embodiment 2
[0189] Based on the same inventive concept, please refer to Figure 13 , the embodiment of the present invention also provides a four-wheel independent drive electric vehicle stability control system, the system includes the steps of:
[0190] The steering wheel angle and vehicle speed acquisition unit 1301 is used to acquire the steering wheel angle and vehicle speed of the electric vehicle when the four-wheel independent steering electric vehicle is in working condition and needs to be turned; wherein, the vehicle speed is a variable speed;
[0191] The variable transmission ratio acquisition unit 1302 is used to obtain the variable transmission ratio between the steering wheel and the rear wheel angle of the electric vehicle at different vehicle speeds based on the vehicle speed and the mathematical model of the vehicle speed transmission ratio;
[0192] A front wheel angle acquiring unit 1303, configured to acquire the front wheel angle of the electric vehicle based on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com