A Kalman filter numerical optimization method based on sins/gps integrated navigation
A technology of Kalman filtering and integrated navigation, which is applied in the direction of electrical digital data processing, special data processing applications, radio wave measurement systems, etc., can solve problems such as numerical instability, engineering application difficulty, and complexity, and achieve high filtering accuracy and ease of use. The effect of engineering realization and high computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
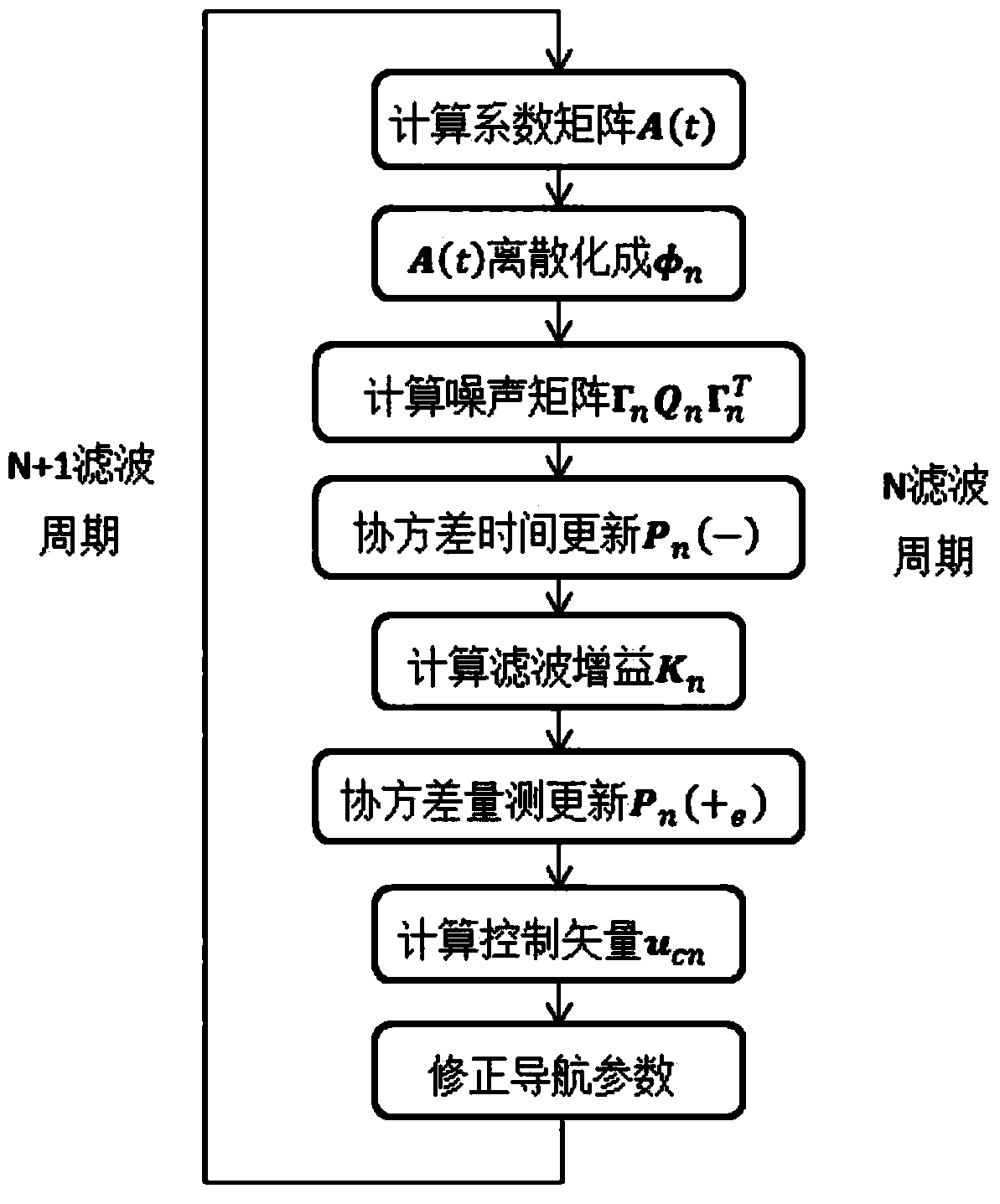
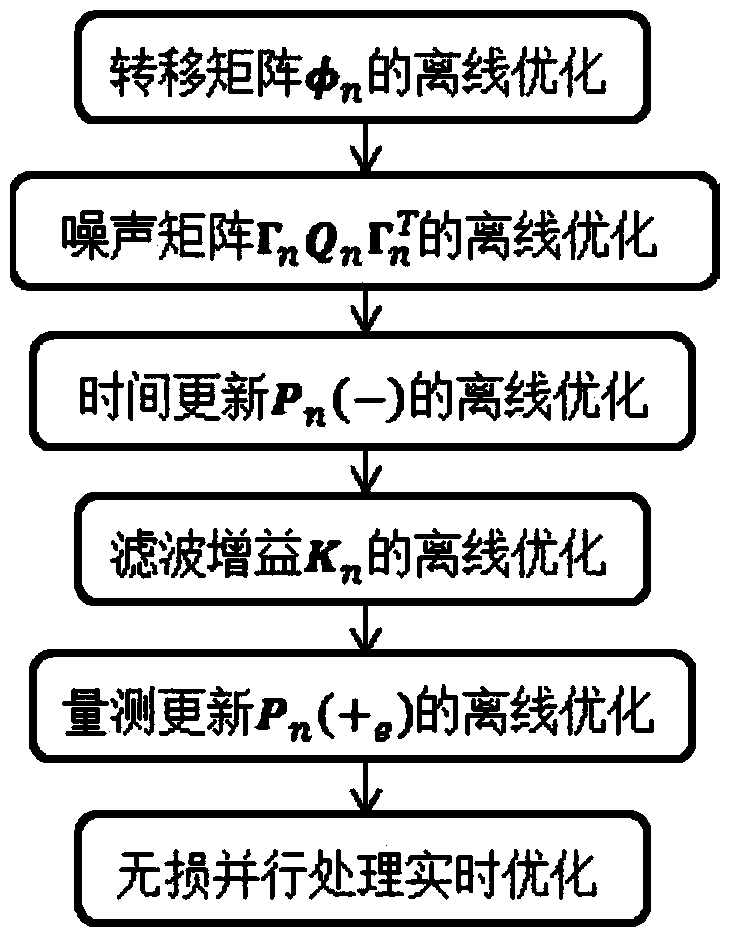
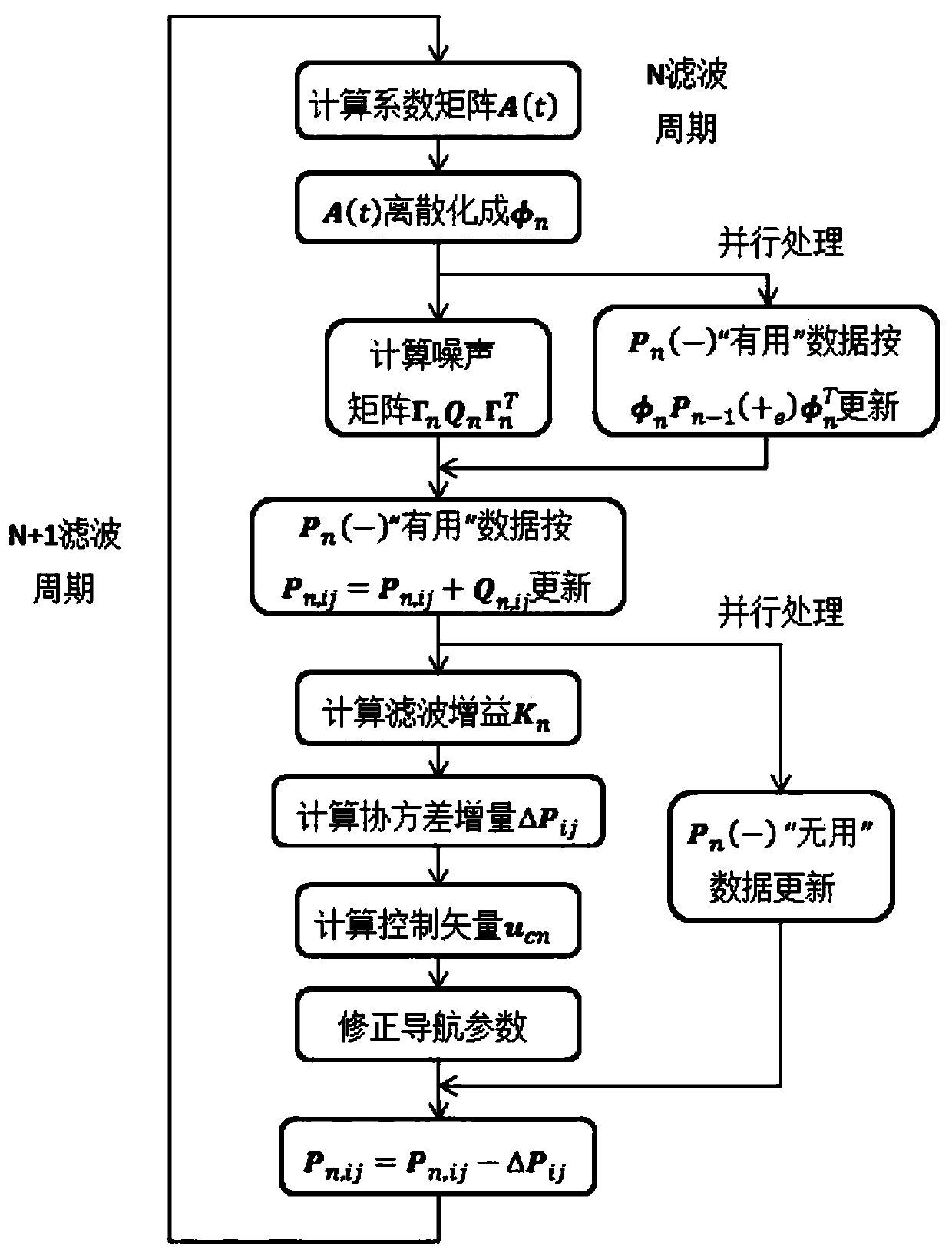
[0034] Combine below figure 1 and figure 2 The implementation process and main processing methods of the present invention are described in detail. The concrete steps of this method are as follows:
[0035] Step 1. Use the indirect method to filter, and directly give the system state equation:
[0036] Formula 1-1
[0037] Among them, the state error x(t), system white noise ω(t), coefficient matrix A(t), G(t) are:
[0038] Formula 1-2
[0039] Formula 1-3
[0040] Formula 1-4
[0041] Formula 1-5
[0042] where, γ x , γ y , γ z are respectively the east, north and sky direction components of the platform error angle; δv x , δv y , δv z are the velocity error components in the east, north, and sky directions; δL, δλ, and δh are the longitude, latitude, and height errors; ε c , ε r 、▽ a are random constant value drift vector, random Markov process drift vector and accelerometer random drift vector respectively; ω g , ω r , ω a They are gyrosco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com