Mixed control method based on trace tracking of wheeled mobile robot
A mobile robot and trajectory tracking technology, applied in two-dimensional position/channel control, etc., can solve problems such as deviation between the actual system and the ideal mathematical model, system instability, and difficulty in achieving control indicators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with accompanying drawing:
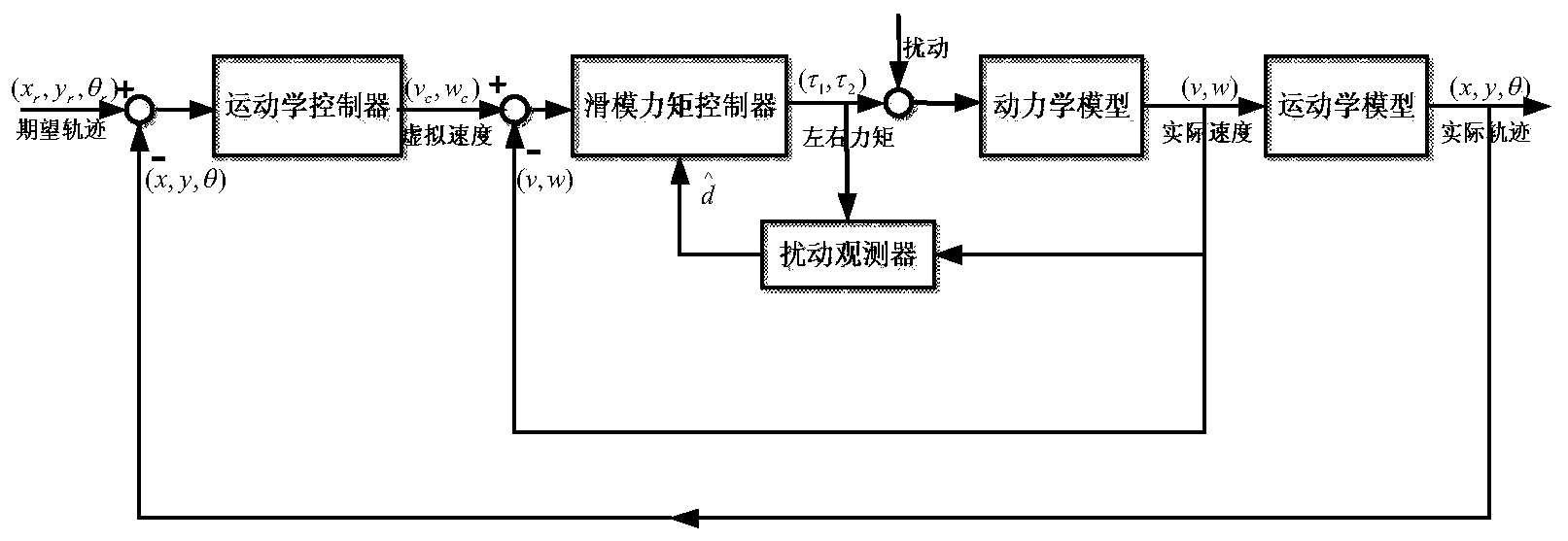
[0036] Such as Figure 1-Figure 12 As shown, the present invention has designed a kind of hybrid control method based on track tracking of wheeled mobile robot, comprises following specific steps:
[0037] Step (1): Analyze the trajectory model and robot actuator, and establish a mobile robot kinematics model and dynamics model with non-integrity constraints;
[0038] Step (2): Use the monocular camera to obtain the trajectory, combined with the kinematics model derived in step (1), determine that the robot needs to realize the trajectory tracking virtual linear velocity and angular velocity controller v c ,w c ;
[0039] Step (3): Use the photoelectric encoder to obtain the angular velocity of the two wheels of the robot according to
[0040] The conversion formula calculates the actual robot linear velocity and angular velocity v,w; calculates the deviation between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com