Parafoil system obstacle avoidance flight path planning method and system
A track planning and parafoil technology, applied in general control systems, control/regulation systems, three-dimensional position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0117] In this embodiment, the track planning of the parafoil system is carried out under the condition of barrier-free, and the objective function is:
[0118] J=f 1 J 1 + f 2 J 2 + f 3 J 3
[0119] That is, without considering the safety obstacle avoidance index J 4 , and compared with the optimal control homing algorithm based on Gaussian pseudospectral method and the segmented homing algorithm based on genetic algorithm. Among them, the optimal track algorithm based on pseudo-spectrum refers to the literature: (1) Gao Haitao, Zhang Limin, Sun Qinglin, etc. Fault-tolerant design of homing trajectory of parafoil system based on pseudo-spectral method [J]. Control Theory and Application. 2013 (06) :702-708; (2) Luo Shuzhen, Sun Qinglin, Tan Panlong, et al. Complex multi-constraint trajectory planning of parafoil system based on Gaussian pseudospectral method[J].Acta Aeronautics Sinica.2017(03): 220-230. The segmented track algorithm based on genetic algorithm refers t...
Embodiment 2
[0122] In this embodiment, the obstacle avoidance track planning of the parafoil system is carried out in the presence of obstacles, and the objective function is:
[0123] J=f 1 J 1 +f 2 J 2 +f 3 J 3 +f 4 J 4
[0124] There are 3 mountain peaks in the parafoil flying area in this embodiment, and their center coordinates are respectively (2000,1000), (1000,3000), (400,1500), and the peak heights are respectively 2500, 2000, 1800. x si 550, 480, 380 respectively, the preset safety distance R safe It is 50 meters, and all the other airdrop conditions are exactly the same as the barrier-free situation in embodiment one. Considering that the segmented homing method has no obstacle avoidance capability, but the pseudo-spectral method has the obstacle avoidance planning capability, so this embodiment compares the optimal obstacle avoidance based on the pseudo-spectral method and the optimal segmented constant value obstacle avoidance navigation disclosed by the present inv...
Embodiment 3
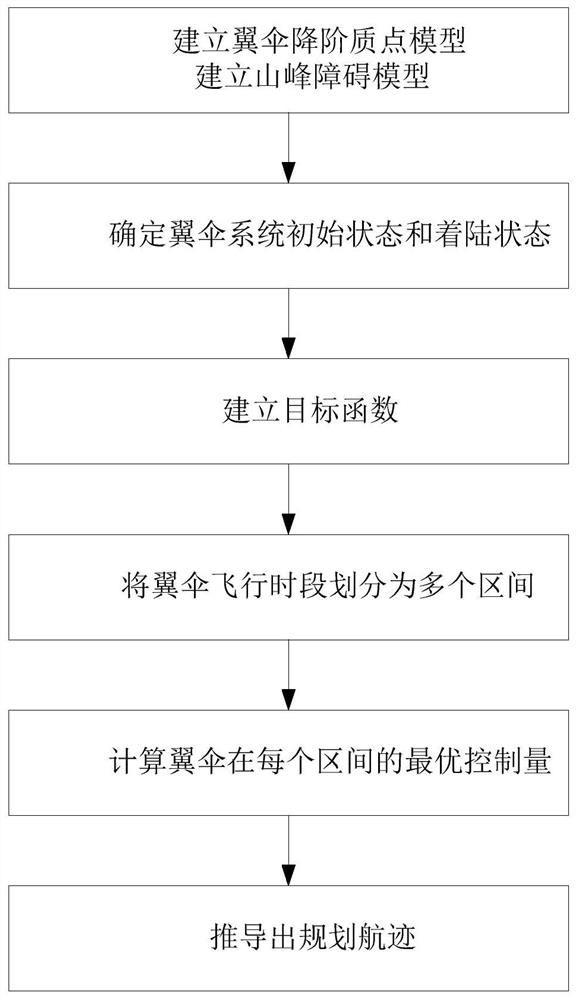
[0131] This embodiment discloses a system for implementing the obstacle avoidance track planning method of the parafoil system in Embodiment 2, as shown in Figure 11, including:
[0132] Parafoil reduced-price particle model building module 1 is used to establish the reduced-order particle model of parafoil under the wind fixed coordinate system:
[0133]
[0134] Where (x, y, h) are the position components of the parafoil system in the x direction, y direction and vertical direction of the horizontal plane in the wind fixed coordinate system, v s is the horizontal velocity of the parafoil system, v z is the velocity in the vertical direction, ψ is the heading angle, is the heading rate, and u is the control value corresponding to the asymmetric downward deflection of the parafoil;
[0135] The mountain obstacle model building module 2 is used to establish the mountain obstacle model in the parafoil flight area:
[0136]
[0137] Among them, h(x, y) is the height val...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com