Data converting method of intelligent vision numerical control system
A technology of data transformation and numerical control system, applied in the direction of digital control, electrical program control, etc., can solve the problems of low efficiency, high quality requirements of personnel, and large consumption of development resources, so as to achieve the effect of convenient data and convenient development
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
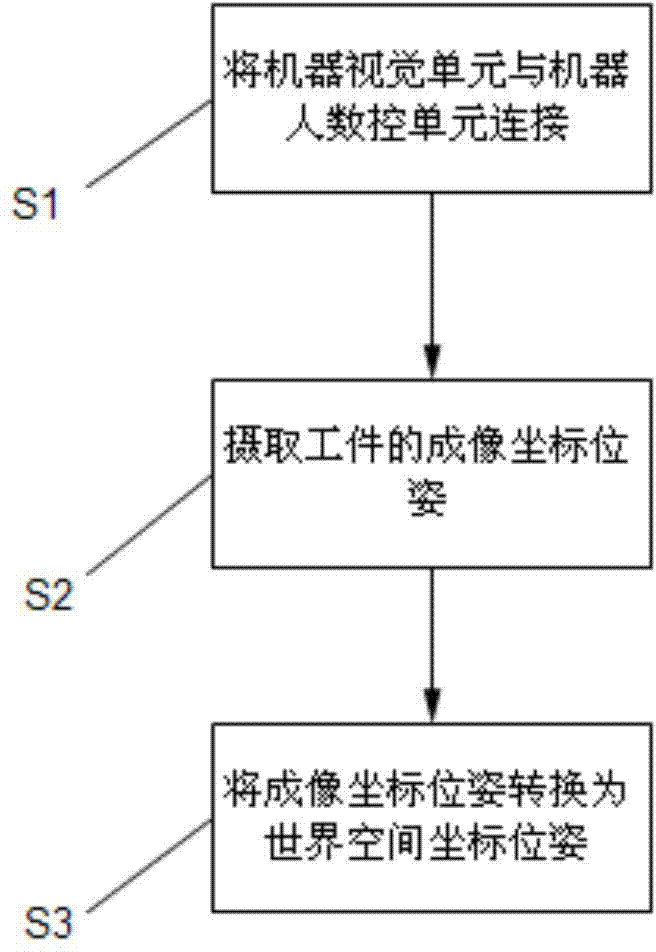
[0037] see figure 1 , which is a flow chart of the data conversion method of the visual intelligent control system of the present invention.
[0038] A data conversion method of a visual intelligent numerical control system, the visual intelligent numerical control system includes a machine vision unit, a numerical control unit and a pose standard module. The data conversion method includes the following steps:
[0039] S1: Connect the machine vision unit with the robot numerical control unit;
[0040] S2: Capture the imaging coordinate pose of the workpiece through the machine vision unit, and send the imaging coordinate data to the pose standard module;
[0041] S3: The pose standard module converts the imaging coordinate pose into a world space coordinate pose, and sends it to the numerical control unit.
[0042] see figure 2 , which is the pose transformation flow chart of the pose standard module. Further, the step S3 specifically includes the following steps:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com