Three-dimensional flight path tracking method for unmanned airship
A track tracking, unmanned airship technology, applied in three-dimensional position/channel control, instrument, adaptive control and other directions, can solve problems such as system buffeting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
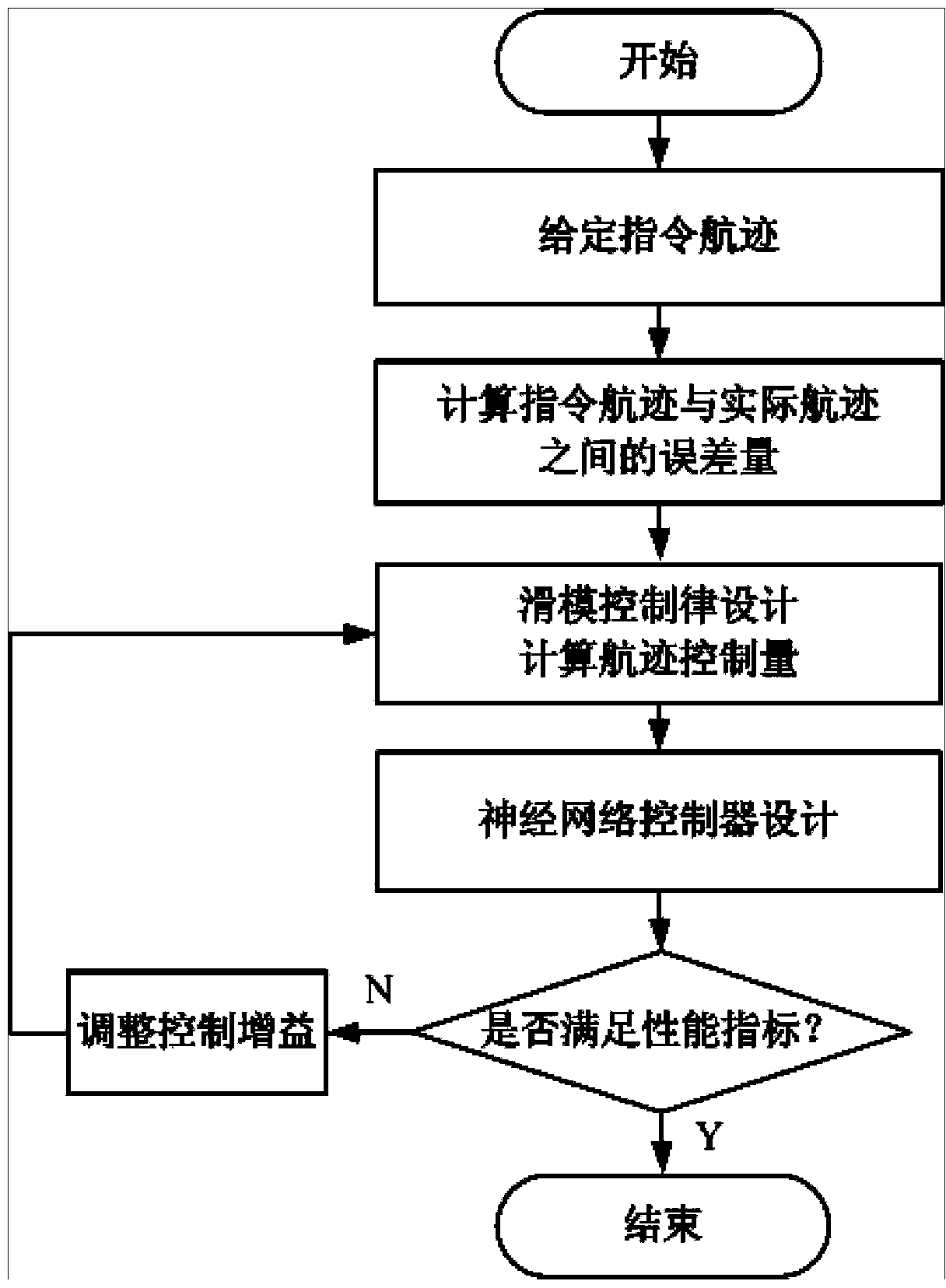
[0134] A kind of unmanned airship track control method of the present invention, its concrete steps are as follows:
[0135] Step 1: Given command track
[0136] The given command track is:
[0137] n d =[x d ,y d ,z d ,θ d ,ψ d ,φ d ] T =[(3t)m,(0.93t)m,10m,0rad,0.3rad,0rad] T , x d 、y d ,z d , θ d 、ψ d and φ d They are command x coordinate, command y coordinate, command z coordinate, command pitch angle, command yaw angle and command roll angle;
[0138] Step 2: Calculate the amount of error
[0139] Calculate the amount of error between the commanded track and the actual track:
[0140] e=η d -η=[x d -x,y d -y,z d -z,θ d -θ,ψ d -ψ,φ d -φ] T ,
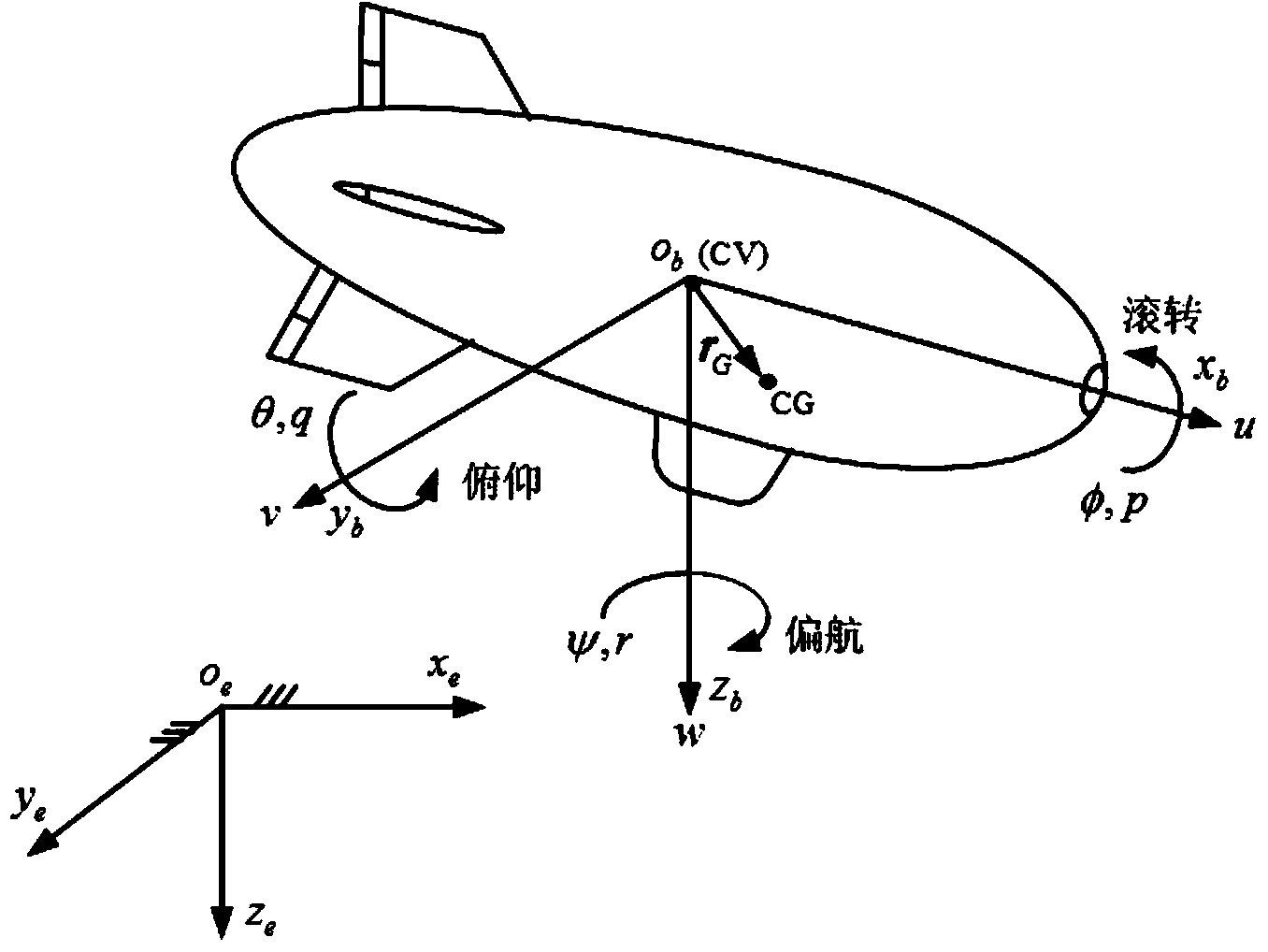
[0141] where, η=[x,y,z,θ,ψ,φ] T is the actual track, x, y, z, θ, ψ, φ are the x coordinate, y coordinate, z coordinate, pitch angle, yaw angle and roll angle of the actual track respectively, which are continuously changing values.
[0142] The initial track is:
[0143] n 0 =[x 0 ,y 0 ,z 0 ,θ 0 ,ψ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com