Autonomous underwater vehicle track predicating method based on marine environment information
A track prediction and underwater submersible technology, which is applied in the field of autonomous underwater submersible track prediction, can solve the problems of large differences in stress conditions of different individuals and the lack of extensive application value of mathematical model methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
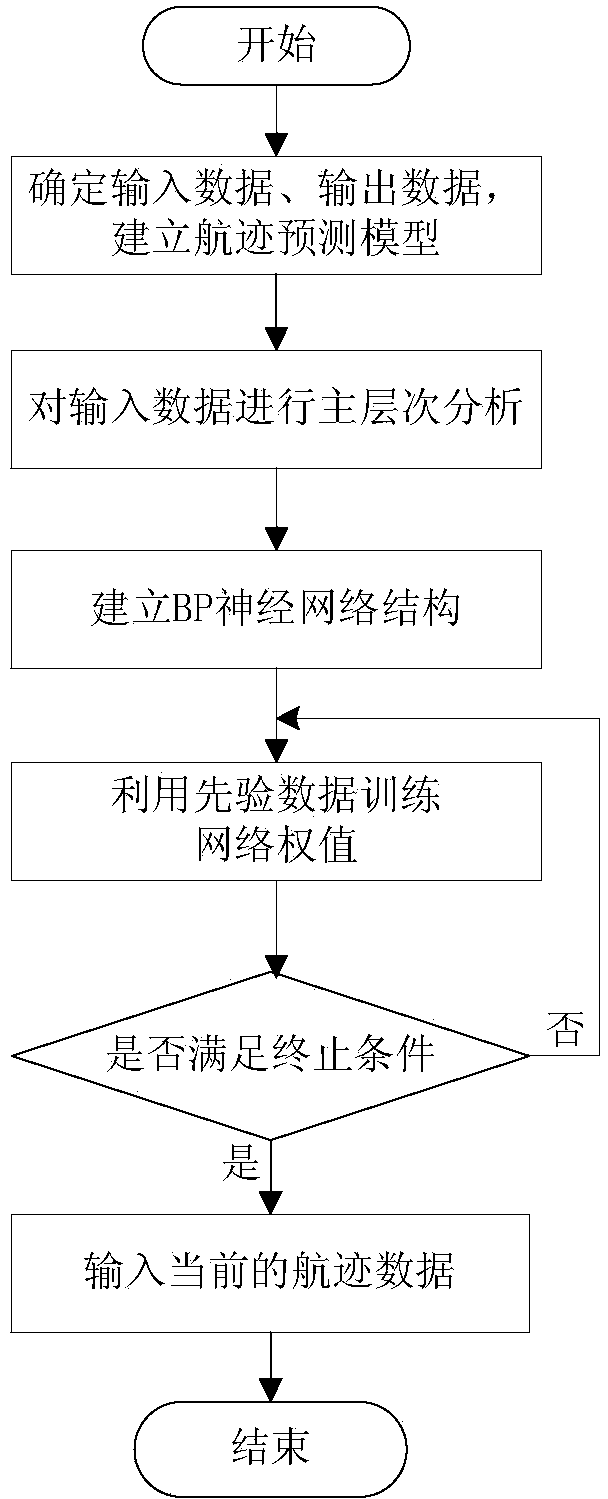
[0070] The following will be combined with figure 1 ~ attached image 3 The present invention is described in further detail.
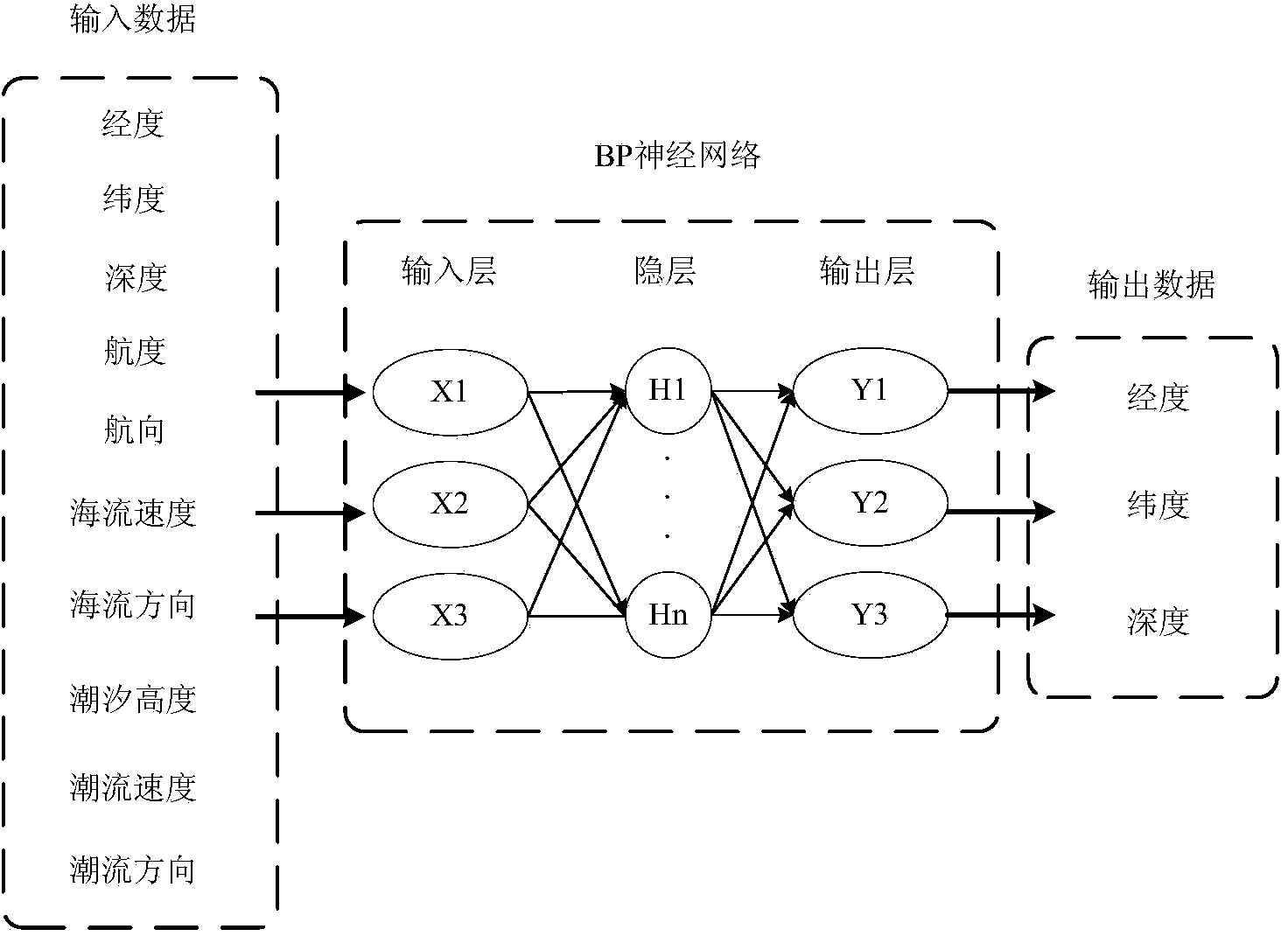
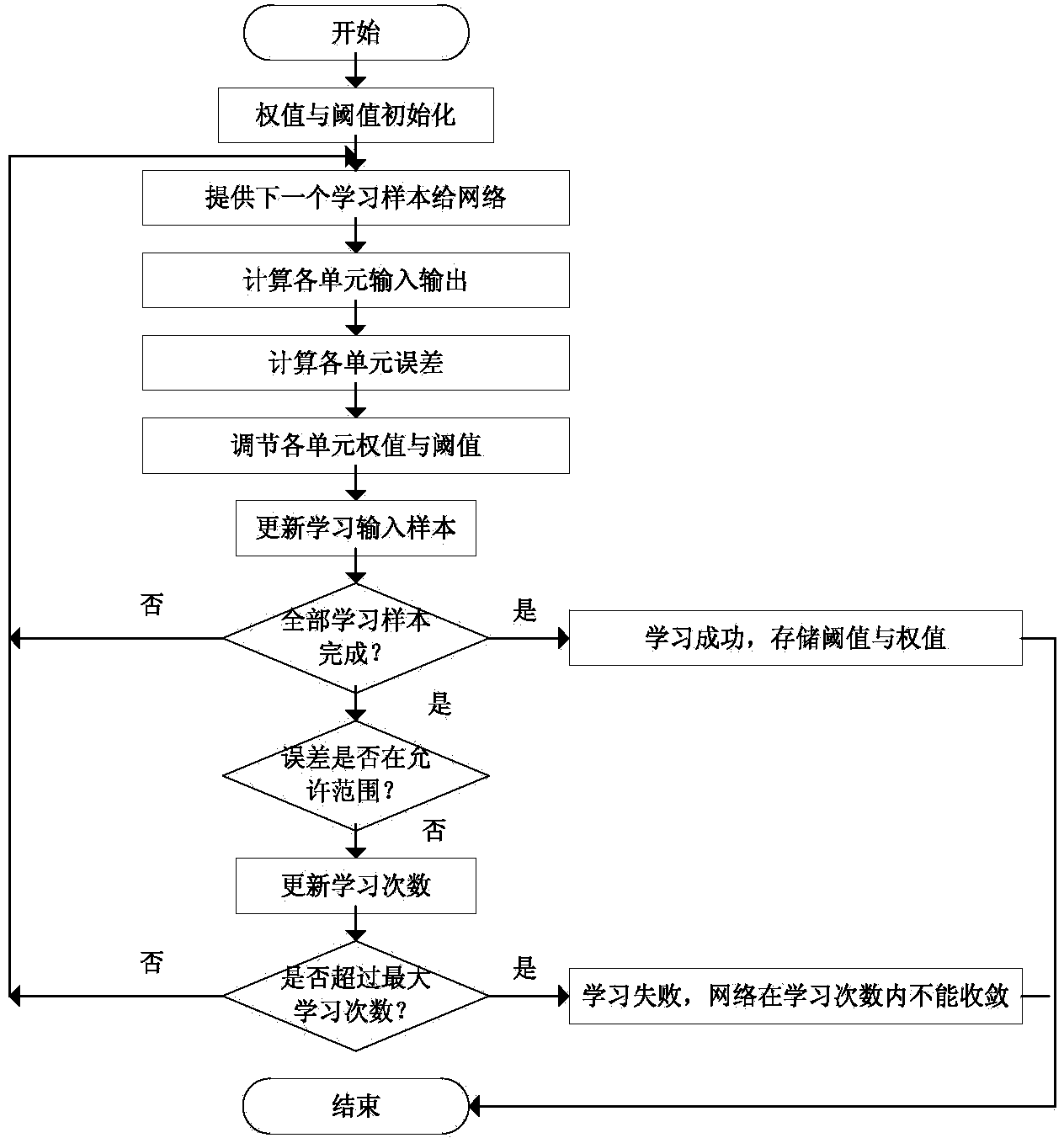
[0071] The invention proposes an autonomous underwater submersible track prediction method based on ocean environment information. Compared with the traditional method of establishing kinematics or dynamics equations for track prediction, the present invention is characterized in that: firstly, the BP neural network prediction model is trained using prior data, and the successfully trained model is used for track prediction , which solves the problem that the establishment of dynamic equations is complicated and difficult to solve due to the large randomness of AUV underwater motion. In addition, the present invention uses marine environment data together with AUV position and control data as the input samples of the BP neural network prediction model, so that the BP neural network can learn more fully, thereby improving the prediction accuracy of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com