Double-lasso driving flexible joint used for exoskeleton robot
An exoskeleton robot and exoskeleton technology, applied in the field of robotics, can solve the problems of increasing the cost of use, the complexity of the overall mechanism, the high price, and the injury to the patient's limbs, so as to improve control performance and safety performance, reduce power consumption, reduce Effects of Mass and Inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solution of the present invention will be described in detail below in combination with the embodiments and the accompanying drawings.
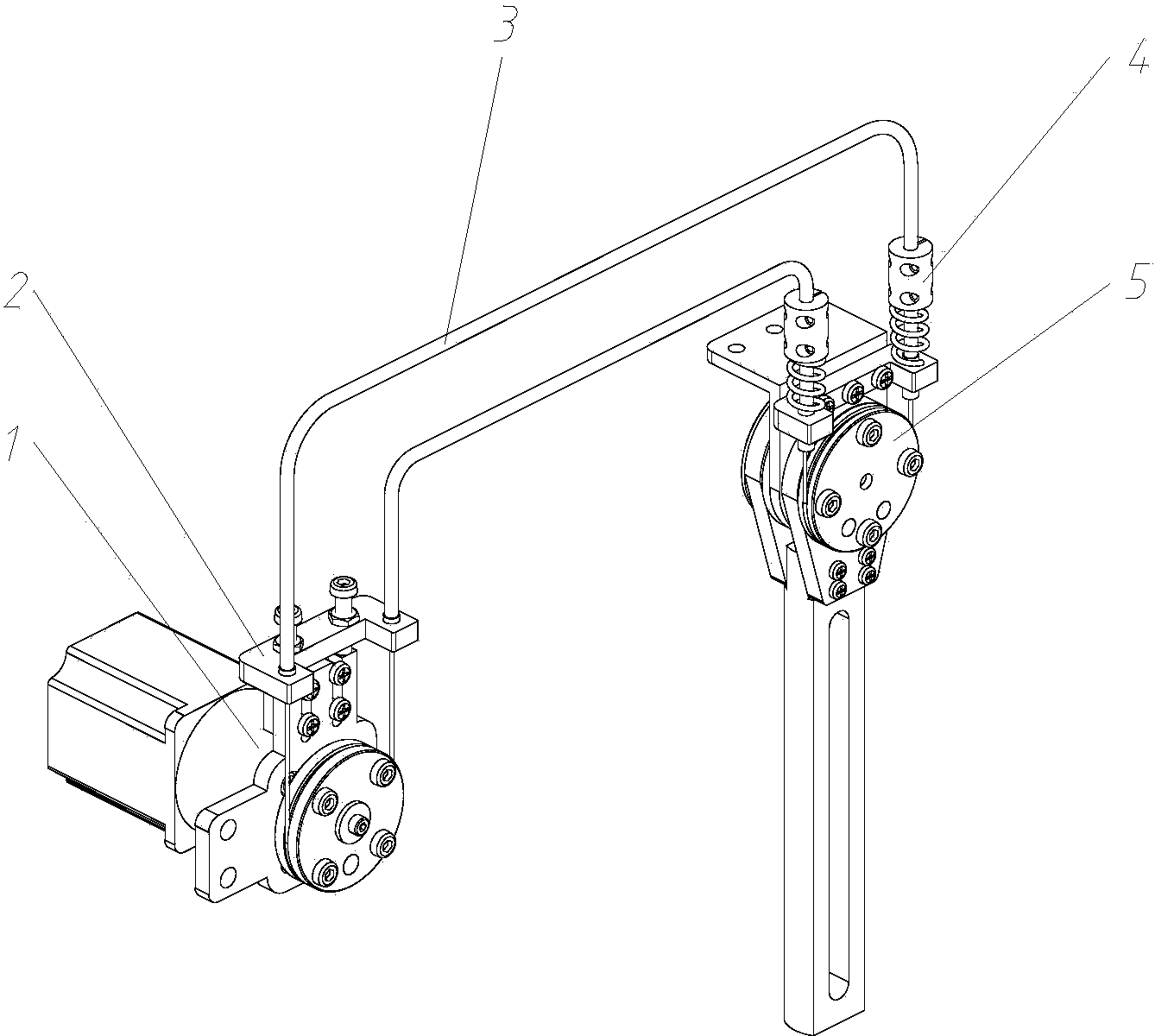
[0032] Such as Figure 1 to Figure 7 As shown, a double lasso-driven compliant joint for an exoskeleton robot includes a driving mechanism 1 , a pretension mechanism 2 , a lasso transmission mechanism 3 , a compliant mechanism 4 and an exoskeleton joint 5 .
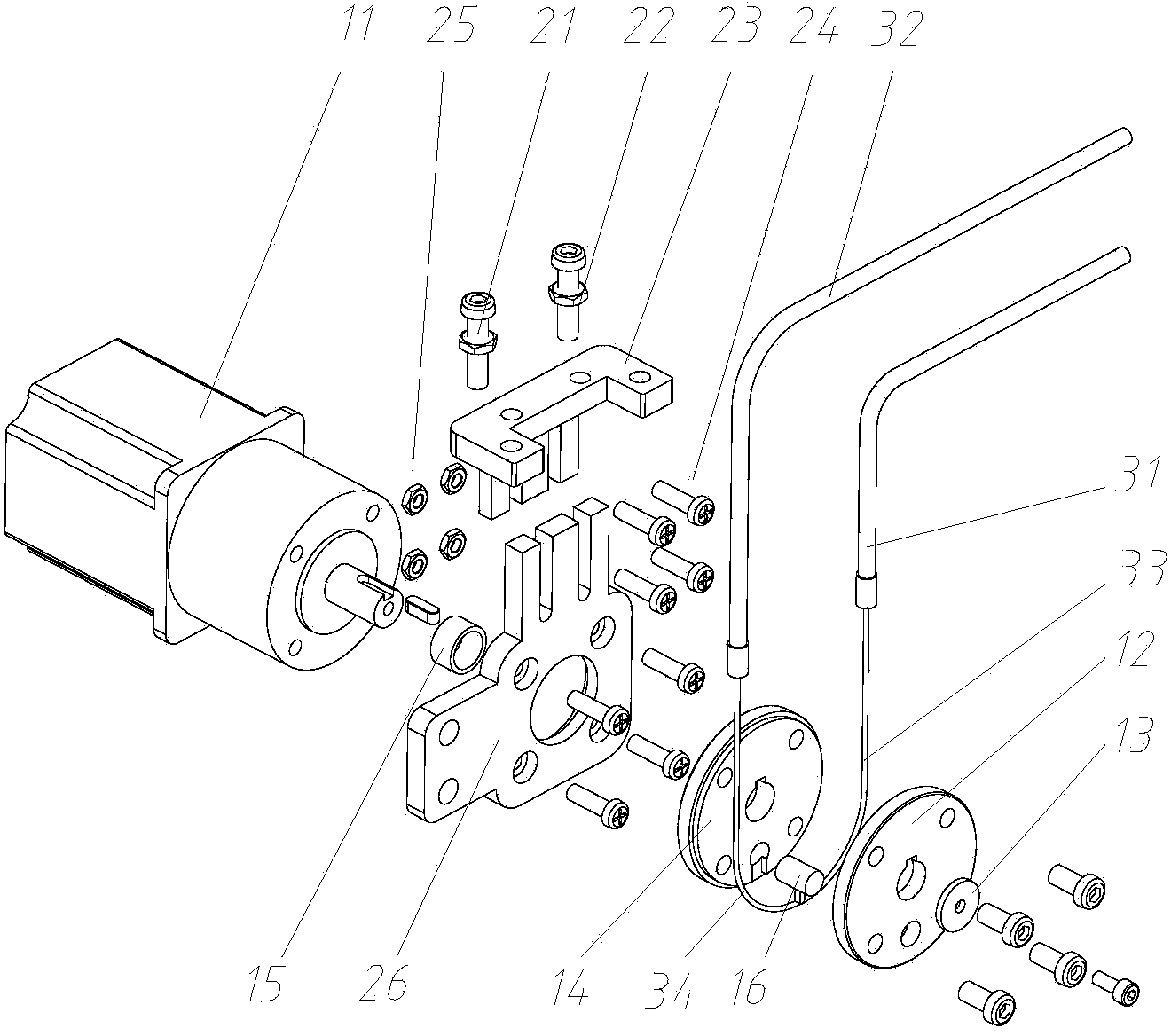
[0033] The driving mechanism includes a motor 11, a driving roller fixedly installed on the rotating shaft of the motor 11, a shaft sleeve 15 and a shaft end baffle 13 that limit the axial movement of the driving roller on the rotating shaft, and a first tightening joint fixed on the driving roller 16. The driving roller is composed of the first driving wheel 14 and the second driving wheel 12 arranged at intervals in parallel and fixedly connected by bolts, and the first fastening joint 16 is arranged in the interval between the first driving wheel 14 and the second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com