Iterative filtering method for tracking before multiframe detection
An iterative filtering and forward tracking technology, applied in radio wave measurement systems, instruments, etc., to solve problems such as inapplicability to short tracks, inability to estimate the true state of the target, and degradation of detection performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
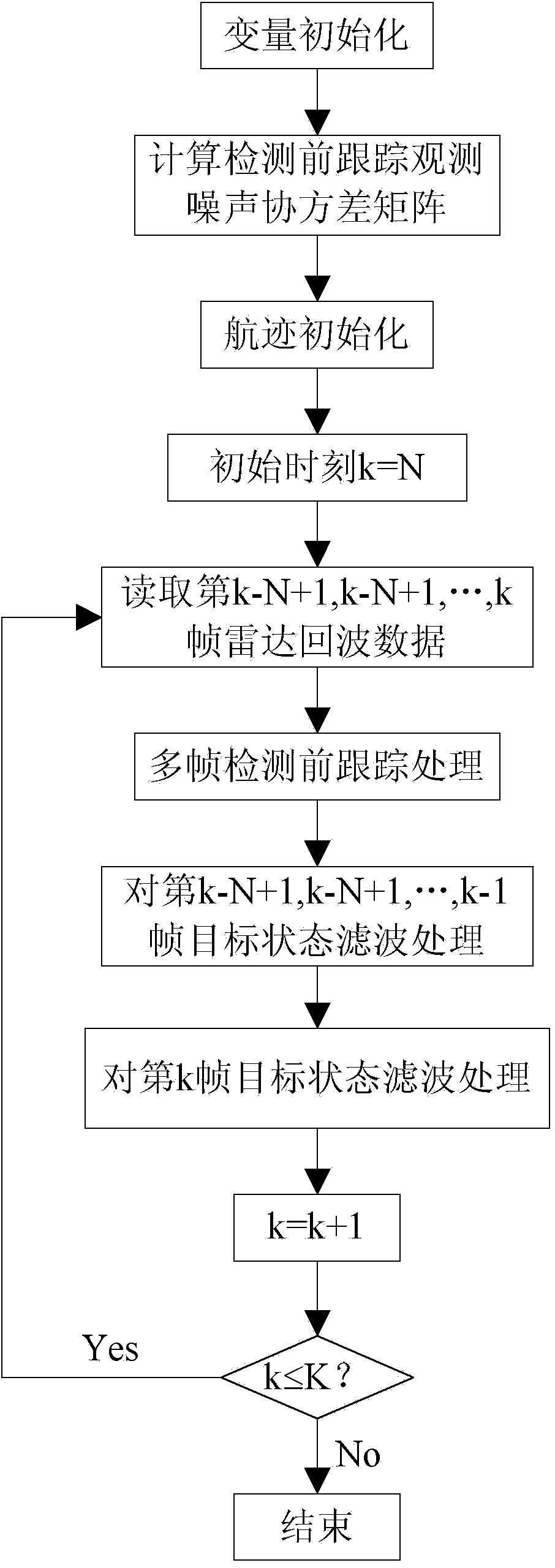
[0055] Implementation steps such as figure 1 Shown:
[0056] Step 1. Initialize system parameters:
[0057] The initialization variables include: the total simulation time K=50; the number of tracking processing frames before one detection N=6; the target signal-to-noise ratio SNR=8dB; the threshold of tracking processing before detection V T =13.7329; elliptic wave gate threshold γ=16; the detection probabilities of the 1st, 2nd,..., N frames of tracking processing before multi-frame detection are 0.806, 0.892, 0.902, 0.890, 0.882, 0.830 respectively; radar scanning period T=1s ;Target state transition matrix F; Observation matrix H; Process noise covariance Q;
[0058] F = 1 T 0 0 0 1 0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com