Inertial Integrated Navigation Method Based on Scene Matching/Visual Mileage
A technology of scene matching and inertial combination, applied in navigation, navigation through speed/acceleration measurement, surveying and navigation, etc., can solve the problem of reliability and accuracy that cannot meet the requirements of high-precision navigation, integrated navigation system errors, GPS signal power Weakness and other problems, to achieve the effect of improving autonomous flight capability, strong anti-interference, and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
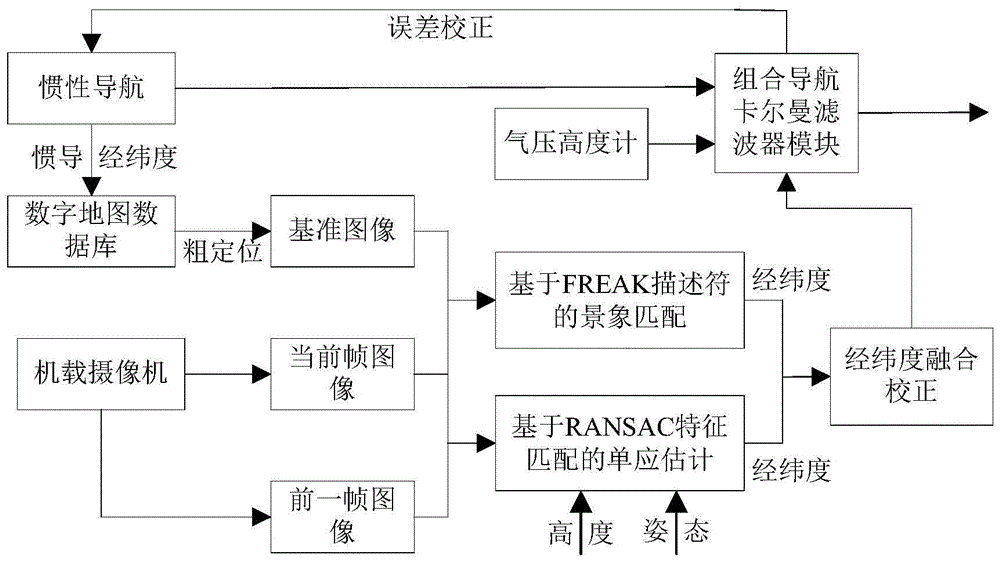
[0062] 1. During the flight of the drone, the on-board down-view camera obtains the ground image in real time a.
[0063] Use the down-looking optical camera or infrared camera onboard the UAV to obtain the ground image sequence in real time, but only need to save the current frame and the previous frame image.
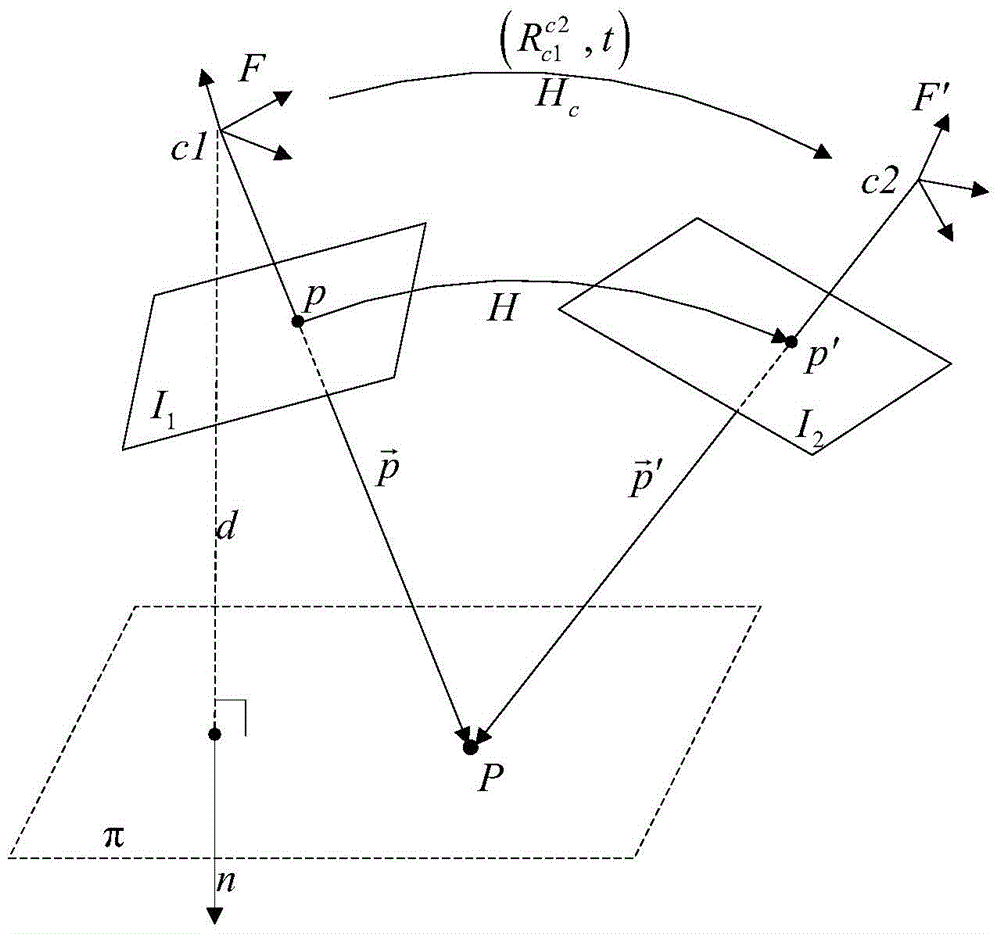
[0064] 2. Using the image a and the previous frame image a', determine the visual mileage of the UAV by estimating the homography matrix of a and a'.
[0065] like figure 2 As shown in the figure, when the drone is in flight, the onboard camera continuously shoots two frames of images I under different poses. 1 and I 2 , the corresponding camera coordinate systems are F and F′, assuming that the point P on the plane π is mapped to the image I 1 The points p and I in 2 The point p' in , corresponding to the vectors in F and F' is and exists
[0066] p → ′ = R ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com