Lower limb power-assisted exoskeleton robot gait pattern identification method and system
A technology of exoskeleton robot and gait mode, which is applied in the direction of equipment to help people walk, gymnastics equipment, muscle training equipment, etc. It can solve the problems of weak and unstable signals, complex signal acquisition, processing and analysis, and achieve easy wearing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
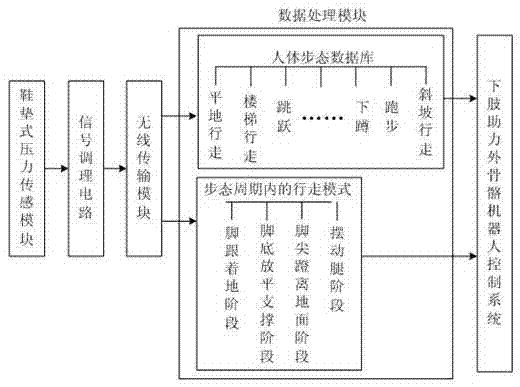
[0039] The invention is a gait pattern recognition method for a lower limb-assisted exoskeleton robot, which provides control decisions for the lower limb-assisted exoskeleton robot, such as figure 1 shown.
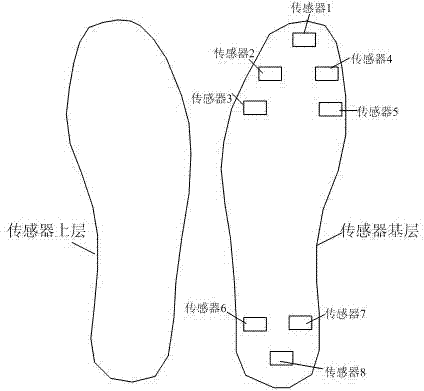
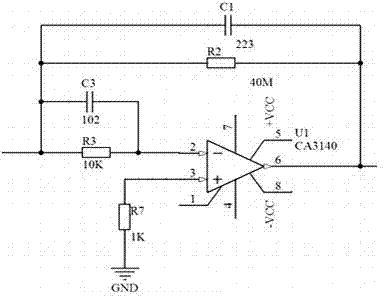
[0040] First of all, the pressure sensing device embedded in the sole of the lower extremity assisting exoskeleton robot detects the wearer's sole pressure confidence, and obtains the sole pressure information through the signal conditioning circuit, data conversion module and wireless transmission module.
[0041] The obtained plantar pressure information is matched with the human gait characteristics in the database. The human body gait database stores the plantar force information of the human body in various motion modes such as walking on flat ground, walking on stairs, walking on slopes, jumping, squatting, and running. Based on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com