Method for coordination control over satellite arms of space robot based on expanded Jacobian matrix
A space robot, Jacobian matrix technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., to achieve the effect of convenient high-precision control, simple method structure, and avoidance of dynamic calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
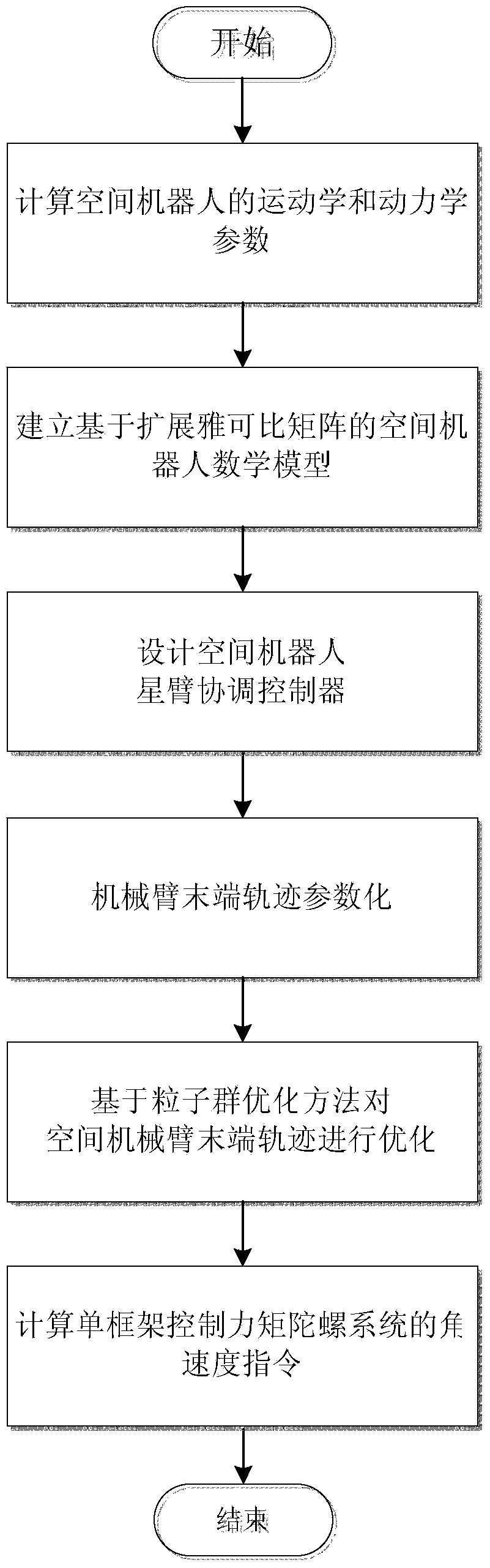
[0021] Specific embodiment one: combination figure 1 , figure 2 with image 3 To describe this embodiment, this embodiment is completed by the following steps:
[0022] Step 1: Calculate the kinematics and dynamics parameters of the space robot including the robotic arm and the base satellite through ProE modeling;
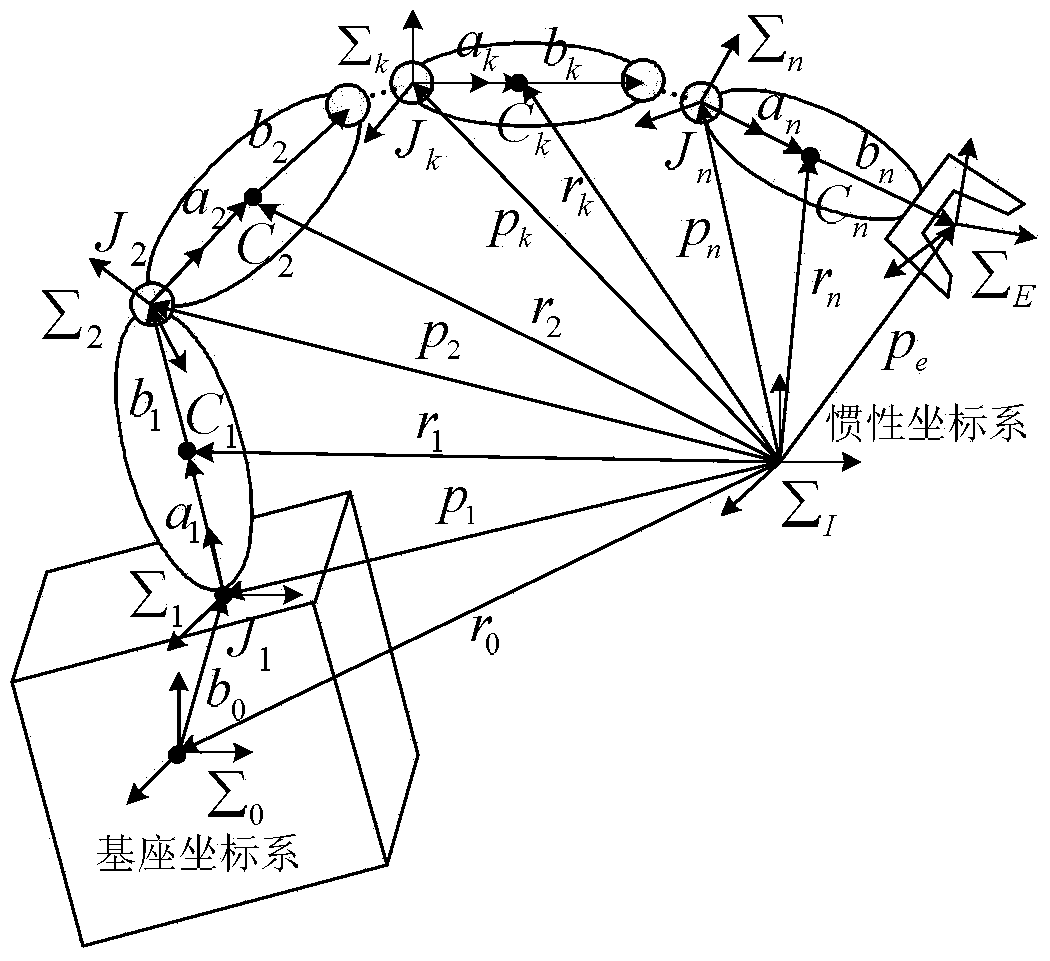
[0023] Step 2: Establish the overall mathematical model of the space robot based on the extended Jacobian matrix;
[0024] Step three, use the Moore-Penrose pseudo-inverse solution method to design the space robot star-arm coordination controller (see equation (6));
[0025] Step 4: Parameterize the end trajectory of the space manipulator;
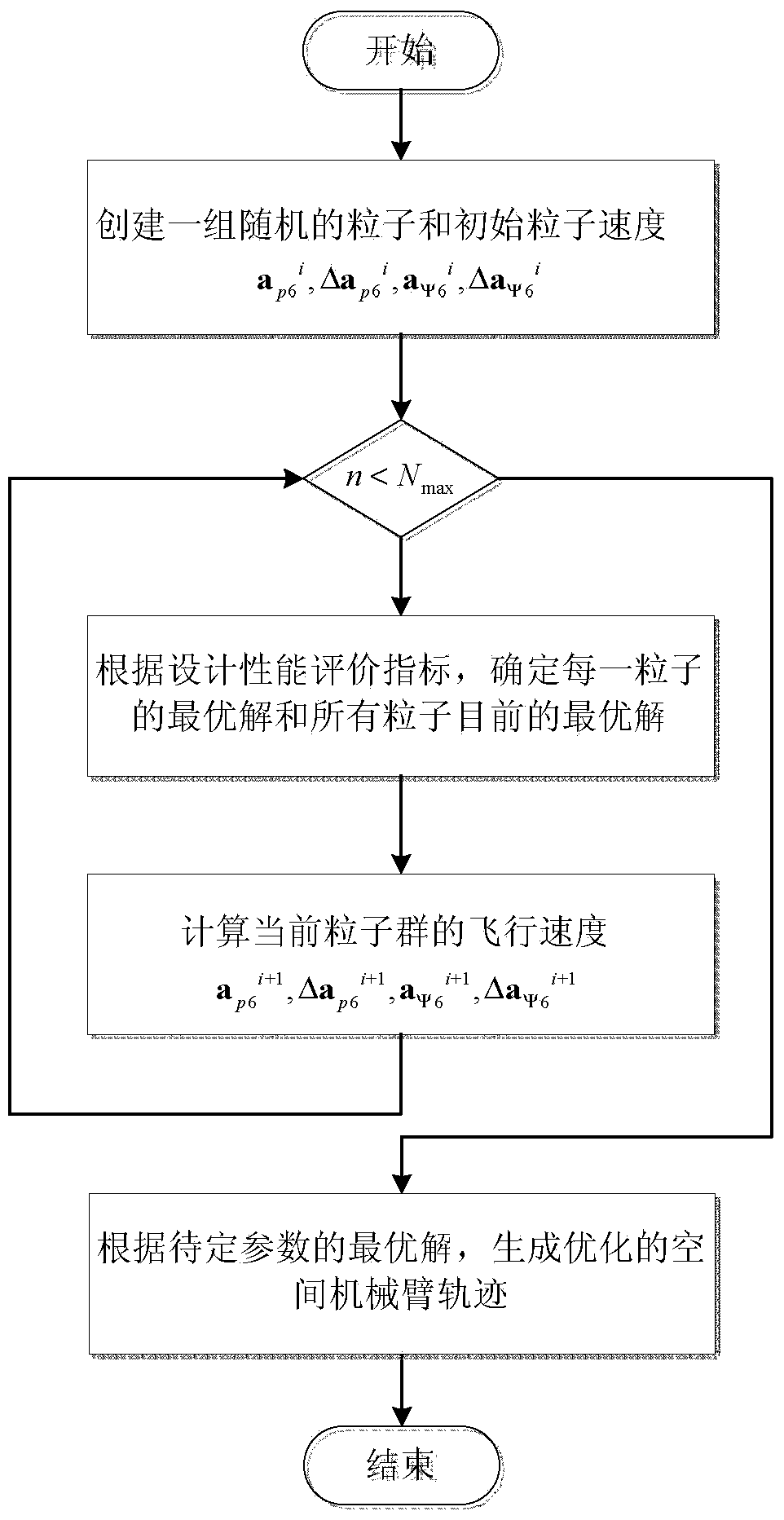
[0026] Step 5. Based on the particle swarm optimization method, an optimization objective function is constructed according to the expression of the angular momentum of the single frame control moment gyro system obtained by the space robot coordinated controller (see equation (12)), and the constructed optimization objective function ...
specific Embodiment approach 2
[0028] Embodiment 2: The difference between this embodiment and the first embodiment is: the formula for establishing the overall mathematical model of the space robot based on the extended Jacobian matrix in step 2 of this embodiment is:
[0029] v e ω e ω 0 = J K Θ · L cmg - - - ( 1 )
[0030] Where J K Is to extend the Jacobian matrix, v e Is the terminal linear velocity of the space robot, ω e Is the end angular velocity of the space robot, ω 0 Is the rotational angular velocity of the carrier satellite, Is the space robot joint angular velocity command, L cmg Is the angular momentum of the single-frame control moment gyro system; extended Jacobian matrix J K Available intermediate variable J g_v , J g_ω , K l_v , K l_ω , J bm_ω And K bl_ω Denoted as a block matrix, let
[0031] J K = J g _ v K l _ v J g _ ω K l _ ω ...
specific Embodiment approach 3
[0050] Specific embodiment 3: The difference between this embodiment and specific embodiment 1 or 2 is: the use of Moore-Penrose pseudo-inverse solution method described in step 3 of this embodiment to design a space robot's star-arm coordinated controller is:
[0051] Θ · L cmg = J K * v e ω e ω 0 - - - ( 6 )
[0052] among them Is the pseudo-inverse of the extended Jacobian matrix
[0053] J K * = J K T ( J K J K T ) - 1
[0054] For J K The transposition.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com